���M����С���˷���PMSM�������R�еđ���
�����J�����Gϼ���o־��
(���ϴ�W�����K�o�a214122)
ժҪ��ᘌ����z�����ӵ���С���˷����R�Y�����Ӵ�Ć��}�������_�P�������������һ�N���͵���С���˅������R�������D�ӑT���l��׃���r��ͨ�^�_�P���ƌ����R���M�г�ʼ�������F�ˌ�����������õ��ھ����R�����挍������ԓ�����˷��˂��y���z�����ӵ���С���˱��R���IJ��ӬF���R�ٶȿ졢���ȸߣ�������Ч�����ϵ�y���ܡ�
�P�I�~������ͬ��늄әC���z��������С���˷����D�ӑT�����������R
0�� ��
Ŀǰ�߾������Ž����ŷ�ϵ�y���о��ѽ�������ƽ�ďV���Pע���ɞ��Ԅӻ��I���һ���о����c��Ȼ��ϵ�y������������ͬ��늄әC(���º��QPMsM)���D�ӑT��׃��Ӱ��^���D�ӑT��׃���r����Ҫ����������ϵ�y���\�Ѕ����M�������{�����ܫ@�Ã����Ŀ������ܡ����Hϵ�y��PMsM���D�ӑT�����yֱ�Ӝy����ͨ�����ñ��R�ķ����@�á������ЌW��ᘌ�PMsM�ŷ�ϵ�y���D�ӑT���ı��R�M���˴������о������������һϵ�б��R�IJ��ԣ���Ӝp�ٷ�����С���˷���ģ�ͅ������m�����ȣ�������С���˷�ԭ�����Σ�������������գ���һ���l���¾������õĽyӋ���ԣ��܌��F��ϵ�y�����^�õ��x�����R����˵õ��V���đ��á�������Ɍ��r׃�������ھ����R����������С���˷��������z�����ӣ������@�N���R�㷨���y�c�����z�����ӵĴ_�����z������̫С��������Ӌ����̫���z������̫�t��ۙ�r׃�����������͕����������R�ĽY���͕���Ӱ푣����Ҫʹ���z�����ӵ���С���˷����r׃���������^�õı��R���ԣ����Ҫͨ�^�����Č���x����m���z�����ӡ����Qԓ���}���������z��������С���˷��Ļ��A�ϣ�ͨ�^�����R�Y���M�з�������ϵ�y����׃���ĕr�̌����R���M�����³�ʼ����ʹ���R���G��ԭ���Ĕ���������׃����ą����M�б��R���Ķ��������z��������С���˷��څ���׃���r���R�Y���IJ��ӣ���PMSM�D�ӑT�����ھ����R����Y���������c�z��������С���˷���ȣ�ԓ�����ܸ���ظ�ۙ늙C�D�ӑT����׃�������ҿ˷��ھ����R�����^��Ć��}��
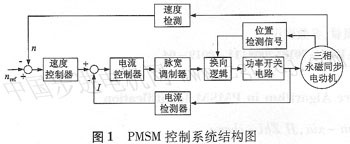
1 PMsM�Ĕ��Wģ�ͼ������ϵ�y
���O��늙C�Ķ����@�M��Y�ͽӷ������Ӵň������ҷֲ��������]�C����ͣ����Ԝu���ʹŜ��p�ġ��D�Ӟ�o�����@�M���tPMsM��d-q����ϵ��
늉����̞飺
늴��D�ط��̞飺
�\�ӷ��̞飺
ʽ�У�ud��uq��d��q�S����늉���id��iq��d��q�S���������Ld��Lq��d��q�S����늸У�p�������ӣ���f�������w������Ŵň���^�����@�M�Ĵ�朣���r���D��늽��ٶȣ�B��ճ��Ħ��ϵ����Te��늴��D�أ�T1��ؓ�d�D�أ�J���D�ӑT������m��늙C�Cе���ٶȡ�
PMsM�Ŀ���ϵ�y�Y����D��D1��ʾ��ϵ�y��������h���ٶȭh�p�]�h���Ʒ���������������PI���ơ�
2���z�����ӵ���С���˷�
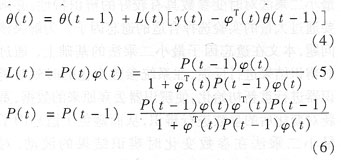
��С���˷������Ǯ������Rϵ�y���\�Еr��ÿȡ��һ���µ��^�y��������ǰ�ι�Ӌ�Y���Ļ��A�ϣ������f���㷨������������^�y������ǰ�ι�Ӌ�ĽY���M���������ó��µą�����Ӌֵ���p�ٹ�Ӌ�`��@�ӣ��S�����^�y������������룬һ�ν�һ�ε��M�Ѕ�����Ӌ��ֱ��������Ӌֵ�_���M��ľ��_�̶ȡ���С���˷����_ʽ�飺
ʽ�У���(t)��t�r�̦ȵĹ�Ӌֵ��L(t)�Q������������P(t)��f�����ꇣ���(t)����Ϣ������
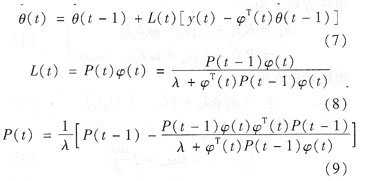
�S�����R�Δ������ӣ��ɼ����Ĕ���Խ��Խ�࣬���ڕr׃����ϵ�y�������a���ı��R�Y�����ܵ��f������Ӱ푶�׃�ò��ʴ_.����ʹ��С���˷����б��R�r׃����������������С���˷��Ļ��A���������z�����Ӧˣ����z��������С���˷����䔵�W��j��ʽ�飺
��Ҋ������=1�r���z��������С |