�����[�ŷ�ϵ�y�еĸɔ_�a������
�������÷־ǧ��������
(1�Ӻ���W�����K����213022��2����֪�R�a������֣�����100088)
ժҪ���о��˻��ڽ�������ͬ��늄әC�ĵ����[�ŷ�ϵ�y�ĸɔ_�a�����Ɔ��}���ڲ����l�ʰ��������R��
늙C�ٶȭhģ�ͅ����Ļ��A�ϣ����øɔ_�^�y���������[�ŷ�ϵ�y����ϵ�y����׃�����Cе�Ǿ��ԵȮa���ĸɔ_
���Թ�Ӌ�������������a����̖������ݔ��ˡ����Y�����������øɔ_�^�y���ĵ����[�ŷ�ϵ�y�����^������
���ԡ�
�P�I�~�������[�ŷ�ϵ�y���l��푑������ɔ_�^�y��
O�� ��
�����[���\���^���н������ܵ�δ��ģ�ӑB��ϵ�y����׃���͙Cе�Ǿ��Ե��ⲿ�ɔ_����������ɔ_�M���^�y���a������ôϵ�y�Ŀ������ܾ͕�׃����Ա�횼��Կ��ơ��ڂ��y�Ŀ��Ʒ����У�ͨ������PID���ƣ�ԓ��������Ч�������A�S�ɔ_������һ���������ԣ����䌦�����ԵĽ�׃�ڔ_���������^����⣬߀�ɲ���ģ�ͅ������m�����ơ���ģ׃�Y�������W�j���ơ��Կ��_��������Y�����ܿ��Ƶȷ�����ϵ�y�еĸɔ_�������ƣ��M������ϵ�y���������ܣ����@Щ����ͨ�������^���s��
���IJ�����Ohnishi��1987������ĸɔ_�^�y��(���º��QDOB)�������[�ŷ�ϵ�y�еĸɔ_�������ơ���һ����ģ���`����ȣ�DOB����푑���Ϳɪ����{�������c������Ч�����A�S�ͽ�׃�ɔ_���Ҍ�ϵ�y����׃�������^���������ԡ��c����������ȣ�DOB�o���~��������������������OӋ�r���x���A�Ρ������A�κ͵�ͨ�V���������ȅ��������F���Σ������`����ڿ��ơ�
1������ͬ��늄әC���ɵĵ����[�ŷ�ϵ�y
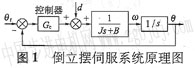
��������ͬ��늄әC��ģ����һ����׃�����Ǿ��ԡ������ϵ�y��������ͬ��늄әC���ɵĵ����[�ŷ�ϵ�y��������h���ٶȭh��λ�íh���ɵ����h�{��ϵ�y�������īI[4]���Ɍ�ԓ�ŷ�ϵ�y�е��ٶȭh������һ�A�T�ԭh��
���У�J��ϵ�y���㵽늙C�S�ϵĵȃr�D�ӑT����B��ճ������ϵ�����D1�鵹���[�ŷ�ϵ�yԭ��D�����Ц�T���ȡ��ء�d�քe��ʾλ�ýo��ֵ�����Hλ��ݔ����늙C�D�ٺɔ_헡��ɔ_헰�����ģ�r�����IJ��_�����Լ��Ǿ���Ħ����ؓ�d׃�����ⲿ�ɔ_��
λ�ÿ��������Â��y��PID������������늙C���ӡ�ֹͣ�������ӽo��ֵ�r���e�֭h�����a���e�ַe�ۣ�����ϵ�y�^��ij��{��������ʎ���@�����ŷ�늙C���\���Dz����ġ����˸��������ܣ����OӋ����PD���ƣ�����f�����飺
ʽ�У�Kp�����ϵ����Kd����ϵ����
2 DOB�Ļ����Y��
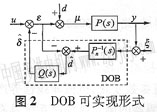
DOB�Ɍ��F����ʽ��D2��ʾ��
�D�У�u��d��d���κ�y�քe���ⲿݔ����̖���ɔ_헡��ɔ_��Ӌ헡��y������ϵ�yݔ����P(s)��ʾ���H���ƌ���ģ�ͣ�Pn(s)��ʾ���xģ�ͣ���Փ���cP(s)��ȡ�����ʹDOB���ڌ��F��ͬ�r����ϵ�y�Ĝy��������DOB��ݔ���˴�����һ����ͨ�V����Q(s)�����H�ϣ�������Θ���ģ�ͣ����Hϵ�y��������ģ����ȫ��ͬ��DOB���nj����Hݔ���c�ؘ�ģ�͵�ݔ��֮������һ����Ч�ɔ_���ڹ�Ӌ���@����Ч�ɔ_֮���������a����̖���õ�ݔ�������������ϵ�y���ܵ�Ӱ푡�
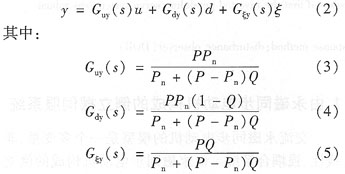
�ɈD2���Եõ���
ʽ�У�P��Pn��Q�քe��ʾP(s)��Pn(s)��Q(s)��
���Q(s)��l���t��
�@����DOBʹ�Ì��Hϵ�y�������c�ؘ�ģ�����ƣ�ͬ�r�����˿���ϵ�y�������ԡ�
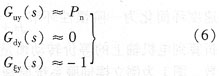
���Q(s)��O���t��
�˕rϵ�y���F���_�hϵ�y�ĄӑB���ԣ�ͬ�r�����˜y������
��ʽ(3)��ʽ(5)���Կ�����DOB���OӋ��Ҫ����Q(s)�����ǛQ��ϵ�y�����ԺͿ��ɔ_ |