����CAN�����IJ��M(j��n)늄�(d��ng)�C(j��)�������O(sh��)Ӌ(j��)
�S����
(��������W(xu��)Ժ������h��723003)
ժҪ����B��һ�N����cAN�������g(sh��)���M(j��n)늄�(d��ng)�C(j��)ͨ�ÿ�����Ӳ���O(sh��)Ӌ(j��)��ԓ��������89c52��Ƭ�C(j��)��(g��u)��һ��(g��)���M(j��n)늄�(d��ng)�C(j��)���ƹ�(ji��)�c(di��n)����cAN������(sh��)�F(xi��n)����������λ�C(j��)��ͨ�š�ԓ���������нY(ji��)��(g��u)��(ji��n)�Ρ����Ʒ�������c(di��n)��
�P(gu��n)�I�~��cAN���������M(j��n)늄�(d��ng)�C(j��)��ͨ�ÿ�����
0 �� ��
����W(w��ng)cAN(controller Area Network)�LJ�(gu��)�H�ϑ�(y��ng)�����V���ĬF(xi��n)��(ch��ng)����֮һ������һ�N��Ч֧�ֲַ�ʽ���ƻ�?q��)��r(sh��)���ƵĴ���ͨ�žW(w��ng)�j(lu��)��20���o(j��)80���ĩ�ɵ�(gu��)Boseh��˾���Q�F(xi��n)����܇�б���Ŀ����c�y(c��)ԇ�x��֮�g�Ĕ�(sh��)��(j��)���Q���_�l(f��)��һ�N���Д�(sh��)��(j��)ͨ�ſ������ǬF(xi��n)��(ch��ng)�������g(sh��)������졢���аl(f��)չǰ;��̎��������W(w��ng)�j(lu��)���������ĸ��ܡ��߿ɿ��ԡ���(sh��)�r(sh��)�Ժ��Լ���(d��)�ص��O(sh��)Ӌ(j��)���яV����(y��ng)�ÙC(j��)е���졢�����C(j��)��(g��u)���r(n��ng)�I(y��)�C(j��)е���C(j��)���ˡ���(sh��)�ؙC(j��)�����t(y��)����е��������ܱO(ji��n)�ء���܇�������͂��������I(l��ng)��Ŀǰ�҇�(gu��)��(du��)cAN�����đ�(y��ng)���о��ѵõ��^��İl(f��)չ�����������ڹ��r(n��ng)�I(y��)�O(ji��n)�ء�늏S�y(c��)�ء����(z��i)��(b��o)����׃�վ���ƺ�ú̿�C�Ͽ��Ƶȷ��档
1���M(j��n)늄�(d��ng)�C(j��)ͨ�ÿ������O(sh��)Ӌ(j��)
�S���\(y��n)��(d��ng)���Ƽ��g(sh��)�IJ����M(j��n)�������ƣ�ͨ���\(y��n)��(d��ng)����������һ��(g��)��(d��)���Ĺ��I(y��)�Ԅ�(d��ng)������a(ch��n)Ʒ���ѽ�(j��ng)��Խ��(l��i)Խ��Įa(ch��n)�I(y��)�I(l��ng)����ܣ������_(d��)��һ��(g��)���˲�Ŀ���Ј�(ch��ng)Ҏ(gu��)ģ�����M(j��n)늄�(d��ng)�C(j��)�����\(y��n)��(d��ng)����ϵ�y(t��ng)��(zh��)��Ԫ��֮һ�������w�eС������(sh��)�F(xi��n)�C(j��)���ơ����ƽY(ji��)��(g��u)��(ji��n)�Σ��ڑ�(y��ng)�����������b�û��O(sh��)���С�ͻ��͵ͳɱ������ѽ�(j��ng)���V���������Ԅ�(d��ng)����ϵ�y(t��ng)�������(zh��)��Ԫ�������Բ���İl(f��)չ����ͨ�ÿ������кܴ�đ�(y��ng)�È�(ch��ng)�ϡ�Ŀǰ�Ј�(ch��ng)�ϲ��M(j��n)늄�(d��ng)�C(j��)����������^�࣬��ͨ�����^����S�ҵĿ������cӋ(j��)��C(j��)�������ݣ��Ñ��x��������ķ����^С������ܛ����(du��)�Ñ����_�š�
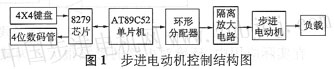
����҂�?c��)O(sh��)Ӌ(j��)�˲��M(j��n)늄�(d��ng)�C(j��)��ͨ�ÿ���������Ӳ�����Ԫ�(d��)�����ض��Ĺ���(y��ng)�̣����Ñ��������^����(n��i)����(j��)�Լ���ϵ�y(t��ng)�x�������������ʽ���Y(ji��)��(g��u)�ϲ���ģ�K������?f��)�Y(ji��)��(g��u)�͘�(bi��o)��(zh��n)�������ӿڣ�������ϵ�y(t��ng)�_�l(f��)�̺��Ñ����Ը���(j��)�Լ���Ҫ����������ģ�K����(bi��o)��(zh��n)��(l��i)���x����ģ�K��ģ�K�gͨ�^(gu��)��(bi��o)��(zh��n)���ӿ�ͨӍ��Ѹ�ٽM�����ÿ���ϵ�y(t��ng)���Ķ������߿���ϵ�y(t��ng)���`���ԡ����M(j��n)늄�(d��ng)�C(j��)�������Y(ji��)��(g��u)��Dl��ʾ��Ӳ���·��D2��ʾ��
ԓ����������AT89c52��Ƭ�C(j��)�a(ch��n)���}�_��̖(h��o)�ͷ�����̖(h��o)����Ƭ�C(j��)��(n��i)����һ��������RAM��ROM�����ԝM��һ·���M(j��n)늄�(d��ng)�C(j��)�Ŀ���Ҫ��������Ժ�(sh��)�H�\(y��n)����Ҫ���ƃ�·늙C(j��)����(sh��)�в��a(b��)�\(y��n)�㣬����Ҫ�U(ku��)չ�ⲿRAM��ROM��
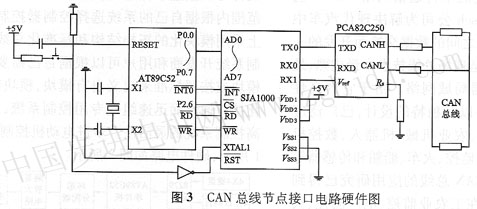
���M(j��n)늄�(d��ng)�C(j��)����ģʽ���÷����}�_����ģʽ���ڷ����}�_����ģʽ�£�����һ·���M(j��n)늄�(d��ng)�C(j��)��Ҫ�ɂ�(g��)��̖(h��o)��������̖(h��o)���}�_��̖(h��o)�����У��}�_��̖(h��o)�l��׃���^�࣬׃���^�죬��(du��)��̖(h��o)���|(zh��)��Ҫ���^�ߣ���ˣ��҂��x���ˏ�T0�_ֱ�������������ܱM���p����̖(h��o)���g̎���h(hu��n)��(ji��)���p����̖(h��o)�ӕr(sh��)�������̖(h��o)�|(zh��)�������⣬���ڷ�����̖(h��o)���^��(w��n)����푑�(y��ng)�l��Ҫ��Ҳ���ߣ����Կ����{(di��o)�Ô�(sh��)��ݔ��ģ�K���һ����(sh��)��(j��)����(l��i)���鷽����̖(h��o)��ʹ�á��h(hu��n)���}�_���������ÿɿصĶ�ܼ����}�_����������������(y��ng)���_�ϼӲ�ͬ�Ŀ����ƽ�����ɵõ���ͬ�Ŀ��ƹ��ܡ����x�(q��)��(d��ng)�Ŵ��·����ֱ�����w�^��������ĺ�������vMOs�ܺ�늸��x�ɲ��֘�(g��u)�ɣ�VMOs���ИO�ߵ�ݔ����裬ǰ��(j��)�(q��)��(d��ng)���С��ݔ�����ʴ�(������_(d��)��ʮ����)����һ�N�^�����Ӌ(j��)��C(j��)�ӿ����������ڲ��M(j��n)늄�(d��ng)�C(j��)�(q��)��(d��ng)�����·��(ji��n)�Ρ��ɿ����o(w��)���ɔ_�ȃ�(y��u)�c(di��n)��
 һ��(g��)���������Կ��ƃ�·�IJ��M(j��n)늄�(d��ng)�C(j��)�\(y��n)�D(zhu��n)�����@����������O(sh��)Ӌ(j��)��һ·���M(j��n)늄�(d��ng)�C(j��)�����·����·���M(j��n)늄�(d��ng)�C(j��)�����·��ͬ�����}�_��̖(h��o)��T1�_��������̖(h��o)���Ĕ�(sh��)��ݔ��ģ�K��������
2 cAN������(ji��)�c(di��n)�ӿ��·�O(sh��)Ӌ(j��)
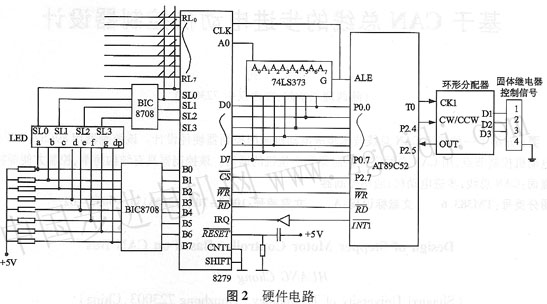
���ˌ�(sh��)�F(xi��n)���M(j��n)늄�(d��ng)�C(j��)�c���������O(sh��)��֮�gͨ�ţ���횰Ѳ��M(j��n)늄�(d��ng)�C(j��)��������ݔ�롢ݔ���D(zhu��n)�Q�ɷ���cAN�f(xi��)�h�Ĕ�(sh��)��(j��)��(bi��o)��(zh��n)������҂�?c��)������·�Ļ��A(ch��)���O(sh��)Ӌ(j��)�˹�(ji��)�c(di��n)�ӿ��·������Ҫ��AT89c52��Ƭ�C(j��)��cAN����������slJAl000��cAN�����(q��)��(d��ng)��Philips 82c250оƬ�M�ɡ���Ӳ���·��D3��ʾ��
�ڌ�(sh��)�H��(y��ng)���У��h(hu��n)����(du��)�·��Ӱ푺ܴ�p���@Щ�ɔ_�����O(sh��)Ӌ(j��)cAN�����Ĺ�(ji��)�c(di��n)�r(sh��)��ͨ�����·��ʹ�ø��ٹ�������������6N137�ȣ�ʹsJAl000��TxO�cRX0��ֱ���c82c250��TxD��RxD���B���� |