�o�˙C��CHIL���淽���о�
��־�h���Z�������Oٻ
(�������I��W���������710072)
ժҪ���麆�����̼����������ɣ���B��һ�N�o�˙C��C��HlL���r���淽����Ԕ���OӋ��ϵ�yӲ���������˻���Simulink�Ķ�C����ϵ�yHlL����ģ�ͣ��Ɍ��r�ھ��{��ģ�ͅ������Oҕ���攵�������F�˶�C��λ���S�ӿ��ơ����Y��������ϵ�y�����^�õČ��r�ԣ��܉��^ȫ����C��C����ܛ���Ŀɿ��ԣ��ӿ��˶�C���o�˙C�����ơ�
�P�I�~���o�˙C��C��HlL���棻λ���S�ӿ���
O�� ��
��C����o�˙C�ƌ�ϵ�y����Ҫ�M�ɲ��֣��Dzٿv�C���w�е���Ҫ���ЙC������_��ܛ���Ŀɿ��ԣ��轨�������ķ���ϵ�y�����M����C��
һ����_�l�^���mȻ���ڼ����ַ����A��ʹ��Matlab�ȷ���ܛ���_�l����ģ�ͣ���߀��Ҫ�˹��Ѽ����ַ���ʹ�õ�ģ�ͷ��g�ɿɱ����r����C���еĴ��a������ֱ�����Ô���ģ�͡�����������_�l�õķ���ģ�ͣ���ֱ�Ӱ��@Щģ�ͷŵ�����C���\����?Matlah��ETTc2000�܉F�@һ���ܡ�ʹ�û���Matlab��ETTTIc2000��HIL���r���淽�������p�ٷ���ܛ�����_�l����������N�ֹ��������a���F���e�`���s�̶�C����ܛ�����_�l���ڡ�
�����OӋ��һ�N�o�˙C��C��HIL(Hardwarein the 1oop)���r����ϵ�y������Matlab 7. l�ṩ��ETTIc2000�M�п�ҕ��ģ�K���̣��ڶ�C����ϵ�y�_�l�^������C�µĿ����ʣ���߮aƷ�_�l�ٶȡ�1 HlI�����r���淽��
HlL������Ŀǰ�������ϵ�y�OӋ�ij��÷��淽������Ӌ��C����(��ܛ��)�͌��r����(Ӳ���ڻ�·)�ЙC�Y�������������H���·늙Cһ����������䌍�rģ�ͣ��c���H�����������]�h�yԇϵ�y���Ɍ�����Y��ֱ�����ڌ��r���ƣ��O����߿���ϵ�y���OӋЧ�ʡ�
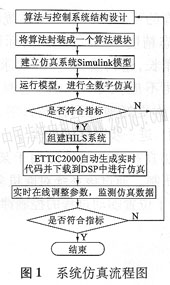
H1L���r���淽�����Ǒ���Matlab��simulinkģ�K��D���������ϵ�yģ�ͣ��ԈD�λ��ķ�ʽ���㷨�M�и�����ڴ��댍�����Ӳ��ƽ�_��ʹ��ETrIc2000�ԄӴ��a���ɹ��ܣ����ɿ���DsP���\�еķ���ģ�͵Č��rc���a�����r�ھ��{�����慢�������������攵����ģ�ͣ���˷���ֱ���M���OӋҪ���ֹ��HIL���r���淽�����F��һ�N�µĿ��ٵď�ȫ���ַ��浽�댍������һ�w���^�̡���������̈D��D1��ʾ��
ETTIc2000(Emhedded TI 2000)DsP�����䌣�Tᘌ�TI��˾2000ϵ��DsP����ccsLInk����A��DsP�Ȳ����ɵ����Oģ�K��Simulinkģ�K����ʽ�o����ͨ�^Madab��Real-Time workshop����ccs IDE���ض�DsP��c���a����ɾ��g��朽�ͬ�r���b��Ŀ�˰����\�С��������^�����OӋ��ֻҪ��ע����Matkb�ĈD�λ��OӋ�h���н�ģ�����棬ᘌ�DsP�Ĵ��a���Ԅ����ɣ��o���OӋ�߾���Դ���a��
2��CHIL������OӋ�c���F
�ϵ�yӲ��������HILsģ�ͺ͌��F�˟o�˙C��CHIL�댍��r����ϵ�y�������@��ϵ�y�ɷ���ض���M���㷨�{�����ھ����r�ķ���ģ�ͻ��{�������Ʌ����������ģ�ֱ���@�ÝM�⡢���϶�C���gָ�ˡ�
2 1ϵ�y�Y��
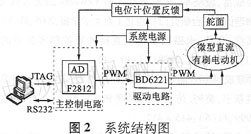
�o�˙C��CHIL����ϵ�y�Y����D2��ʾ�����λ�íh�]�h����ϵ�y����Ҫ����λ�C(Pc�C)���������·��λ�÷����ɘ��·��늙C�������·��ֱ��늄әC�ȽM�ɡ���TI��˾TMS320F2812������оƬ��������·���ɵ��������·����ɸ��Nģ�M��������̖�IJɼ����ṩ늙C����̖�����c��λ�C�M��ͨ�š�DsP���a��Simu1inkģ���ԄӮa���Ķ����ܛ�����F��
�����Ӳ���H��оƬBD6221���Ȳ������˹��ϙz�y���^���^�����o�ȶ�N���ܣ��O����Ӳ���·���ɿ����c�����Զ��д����ߡ�ϵ�y�x������ˢֱ��늄әC����ԭʼ�������������չ����Ӱl�͵Ć�·PwM��̖�����Ӷ����ƫ�D��
ϵ�y�x�þ��܌�����Ͼ����λӋ����λ�òɘ��b�ã��c����u��ͬ�S���B���λӋ���D����ֵ������׃����ݔ��늉�ֵ�t��ӳ�˶��挍�H��ƫ�D�ǡ�
�������·��DsP����λ�÷�����̖����̎�����ς���λ�C����simmulinkģ���н�������ɣ��a��늙CPwM������̖���ٌ��Ԅ����ɵ�ģ�ʹ��a���b��DsP���\�У�ͨ�^���·��늙C�l�Ϳ���ָ��Ķ�����늙C�\�С�
2 2λ�íh�������OӋ
λ�íhֱ�ӛQ����C�ŷ�����ϵ�y�Ąӡ��o�B����ָ�ˣ�ϵ�yλ�íh�{����������ʽPID�����㷨���ܱ��Cϵ�y���^���푑��ٶȣ�ͬ�r�����^�õ��o�B���ܺ�С���{����
|