š¬ę¬Ż║×ķīŹ¼FXĪ¬YČ■ŠS╣żū„ŲĮ┼_Ą─Š½┤_Č©╬╗Ż¼ęį╚▌¢┼é„ĖąŲ„ū„×ķ╬╗ų├Öz£yŁh╣ØŻ¼īŹĢrĄ─īó╣żū„┼_Ą─▀\äėĀŅæBĘ┤üĮoå╬Ų¼ÖCŻ¼å╬Ų¼ÖCĖ∙ō■įOČ©│╠ą“ī”ā╔éĆĘĮŽ“Ą─▓Į▀MļŖÖC▀Mąąķ]Łh┐žųŲĪŻ═©▀^īó┐═¢┼é„ĖąŲ„▌ö│÷Ą─┤«ąąą┼╠¢▐DōQ│╔▓óąąą┼╠¢Ą─ĘĮĘ©Ż¼ĘĮ▒ŃĄžīŹ¼F┴╦å╬Ų¼ÖCī”╚▌¢┼é„ĖąŲ„▌ö│÷ą┼╠¢Ą─╠Ä└ĒĪŻįć“×ūC├„Ż¼▀@ĘN┐žųŲĘĮĘ©─▄īŹ¼F╣żū„ŲĮ┼_Ą─Š½┤_Č©╬╗Ż¼Š▀ėą▌^Ė▀Ą─īŹė├ārųĄĪŻ
ųąłDĘųŅÉ╠¢Ż║TM383 6Ż╗TP271Ż«4 ╬─½Iś╦ųŠ┤aŻ║A ╬─š┬ŠÄ╠¢Ż║1001-6848(2010)01-0103-03
0ę² čį
į┌ī”XĪ¬Yā╔▌S▀\äėĄ─╣żū„ŲĮ┼_▀Mąą┐žųŲĢrę╗░Ń▓╔ė├å╬Ų¼ÖC×ķų„┐žųŲå╬į¬ī”xĪ¬Yā╔▌S“īäė▓Į▀MļŖÖC▀Mąą┐žųŲĪŻ▓Į▀MļŖÖCĄ─ų„ę¬ā׳cų«ę╗╩Ū─▄į┌ķ_ŁhŽĄĮyųą▒ŻūCę╗Č©Ą─┐žųŲŠ½Č╚Ż¼Ą½ķ_ŁhŽĄĮyę▓Š▀ėąę╗ą®╚▒³cŻ║¤oĘ©ų¬Ą└▓Į▀MļŖÖCį┌³c╬╗▀\äėĄ─ä“╦┘ļAČ╬║═ŲäėĄ─╔²╦┘ļAČ╬╩Ūʱ╩¦▓ĮŻ¼į┌▓Į▀MĮY╩°Ģr╩Ūʱ│¼▓ĮŻ¼ęį╝░ė╔ė┌žō▌dūā╗»Č°ę²ŲĄ─╦┘Č╚ūā╗»Ż¼ė╚Ųõ«öžō▌d▐DŠž▌^┤¾Ūęėąø_ō¶¼FŽ¾ĢrŻ¼╩¦▓Į║═üG▓Įå¢Ņ}Š═’@Ą├╩«Ęų═╗│÷Ż¼Å─Č°╩╣▓Į▀MļŖÖCĄ─ķ_Łh┐žųŲĄ─æ¬ė├╩▄ĄĮę╗Č©│╠Č╚Ą─ė░ĒæĪŻ
×ķīŹ¼FXĪ¬Y╣żū„ŲĮ┼_Ą─£╩┤_Č©╬╗Ż¼▓╔ė├┴╦ęį╚▌¢┼é„ĖąŲ„ū„×ķ╬╗ų├Öz£yŁh╣ØĄ─╚½╦┼Ę■┐žųŲŻ¼ŲõĖ∙▒ŠĄ─ĘĮĘ©Š═╩Ū╚▌¢┼é„ĖąŲ„īóÖz£yĄĮĄ─╣żū„ŲĮ┼_Ą─īŹļH╬╗ęŲĘ┤üĮo┐žųŲŲ„Ż¼┐žųŲŲ„Ė∙ō■Öz£yĄĮĄ─īŹļH╬╗ęŲ║═╦┘Č╚ĀŅæBŻ¼üĒīŹĢrš{š¹▌ö╚ļĄ─├}ø_öĄĪóŅl┬╩Ż¼╩╣▓Į▀MļŖÖCĘĆČ©į┌š²│Ż▀\ąąĀŅæBŻ¼▓ó╩╣īŹļH╬╗ų├║═ųĖ┴Ņ╬╗ų├ę╗ų┬Ż¼Å─Č°▀_ĄĮŠ½┤_Č©╬╗║═ĘĆ╦┘Ą─ę¬Ū¾ĪŻ
1ė▓╝■ĮM│╔
ęįx▌S▀\äė×ķ└²Ż¼Ųõķ]ŁhŽĄĮyĮYśŗłD╚ńłD1╦∙╩ŠĪŻ
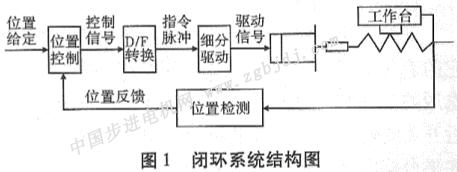
įōŽĄĮy▓╔ė├╚▌¢┼╩Į╬╗ęŲé„ĖąŲ„Öz£yxĪ¬Y╣żū„┼_Ą─╬╗ęŲą┼ŽóŻ¼┤╦ą┼ŽóĮø╠Ä└Ē▐Dūā×ķ┼c╣żū„┼_╬╗ęŲ┴┐╝░╬╗ęŲ╦┘Č╚│╔▒╚└²Ą─├}ø_ą┼╠¢Ę┤üĮo╬╗ų├┐žųŲŲ„Ż¼╬╗ų├┐žųŲŲ„Ė∙ō■╬╗ų├ĮoČ©ųĄ┼cĘ┤üųĄų«▓ŅŻ¼░┤╩┬Ž╚įOėŗ║├Ą─┐žųŲęÄ┬╔üĒ┐žųŲš¹éĆŽĄĮyĄ─▀\ąąŻ¼▒ŻūC╣żū„┼_Ą─╬╗ęŲć└Ė±Ė·ļSųĖ┴Ņę¬Ū¾üĒ▀\äėŻ╗DŻ»F(öĄūųŻ»├}ø_)▐DōQŲ„īó╬╗ų├┐žųŲŲ„▌ö│÷Ą─öĄūųą┼╠¢▐DōQ│╔ųĖ┴Ņ├}ø_Ż╗╝ÜĘų“īäėŲ„Ą─╣”─▄╩ŪęįąĪ▓ĮŠÓ“īäė▓Į▀MļŖÖC▐DäėŻ¼▓ó╩╣╣żū„┼_╬╗ęŲŠ▀ėą╦∙ę¬Ū¾Ą─Ęų▒µ┬╩Ż¼īŹ¼Fī”ŽĄĮyĄ─Ė▀Š½Č╚┐žųŲĪŻ
š¹éĆŽĄĮy╩Ūę╗éĆā╔╝ēĄ─┐žųŲŽĄĮyŻ¼╔Ž╬╗ŽĄĮyų„ę¬ė╔ę╗┼_586PCÖCśŗ│╔Ż¼Ž┬╬╗┐žųŲŽĄĮyė╔ā╔ēKPHILIPS╣½╦Š╔·«aĄ─P87LPC764å╬Ų¼ÖCĮM│╔Ż¼╚ńłD2╦∙╩ŠĪŻ╔Ž╬╗ÖCų„꬞ōž¤Č■ŠSČ©╬╗ŲĮ┼_▀\äė╬╗ų├Ą─▓╔╝»║═┐žųŲŽ┬╬╗å╬Ų¼ÖCŻ╗Ž┬╬╗å╬Ų¼ÖCĘųäe═Ļ│╔ę╗┬Ę▓Į▀MļŖÖC“īäėĪóĮŌūx╚▌¢┼╬╗ęŲé„ĖąŲ„▌ö╚ļą┼╠¢ĪóŽ▐╬╗ķ_ĻP▌ö╚ļą┼╠¢Īó║═PCÖC▀Mąą═©ą┼ĪŻPCÖC┼cā╔å╬Ų¼ÖCų«ķg═©▀^RS232┤«ąąĮė┐┌═©ą┼Ż¼ŲõųąX▌Så╬Ų¼ÖC┐žųŲŲĮ┼_XĘĮŽ“▀\äėĄ─▓Į▀MļŖÖCŻ¼┼cPCÖCĄ─┤«┐┌1(COMl)ŽÓ▀BŻ¼Y▌Så╬Ų¼ÖC┐žųŲŲĮ┼_YĘĮŽ“▀\äėĄ─▓Į▀MļŖÖCŻ¼┼cPCÖCĄ─┤«┐┌2(COM)ŽÓ▀BĪŻŲĮ┼_XĪóYĘĮŽ“Ęųäečbėą╚▌¢┼╩Į╬╗ęŲé„ĖąŲ„Ż¼Įø┤«▓óĮė┐┌▐DōQ║¾Ęųäe║═å╬Ų¼ÖCŽÓ▀BŻ¼īóŲĮ┼_Ą─▀\äėĀŅæBĘ┤üĮoå╬Ų¼ÖCĪŻ×ķ┴╦Ę└ų╣╣żū„ŲĮ┼_▀\äė│÷ĮńŻ¼į┌XĪóYā╔▌SĄ─śOČ╦╬╗ų├ĘųäeįOų├┴╦Ž▐╬╗ķ_ĻPŻ¼┐╔ęįį┌ŲĮ┼_│¼│÷▀\äėĘČć·ĢrūįäėŪąöÓļŖÖCĄ─ļŖį┤Ż¼╩╣ŲĮ┼_═Żų╣▀\äėĪŻ
å╬Ų¼ÖC▓╔ė├Į³─ĻüĒ╩ął÷╔Ž▒╚▌^┴„ąąĄ─AT89C52å╬Ų¼ÖCŻ¼╦³▓╔ė├CHMOS╣ż╦ć╝░Ė▀├▄Č╚Īó
ĘŪęū╩¦┤µā”╝╝ągųŲįņŻ¼┼c80C51ę²─_║═ųĖ┴ŅŽĄĮy═Ļ╚½╝µ╚▌Ż¼Ųõā╚▓┐╦∙║¼╣”─▄▓┐╝■╚ńŽ┬Ż║
(1)1éĆ8╬╗CPUŻ╗
(2)1éĆŲ¼ā╚š±╩ÄŲ„╝░ĢrńŖļŖ┬ĘŻ╗
(3)8 KB PEROMŻ╗
(4)3éĆ16╬╗Č©ĢrŻ»ėŗöĄŲ„Ż╗
(5)21éĆ╠ž╩Ō╣”─▄╝─┤µŲ„Ż╗
(6)4éĆ8╬╗▓óąąIŻ»O┐┌Ż¼╣▓32Śl┐╔ŠÄ│╠IŻ»OČ╦ŠĆŻ╗
(7)1éĆ┐╔ŠÄ│╠╚½ļp╣ż┤«ąą┐┌Ż╗
(8)8éĆųąöÓį┤ĪŻ