���چ�Ƭ�C(j��)�Ķ�·��C(j��)ƽ��(w��n)�(q��)��(d��ng)�������O(sh��)Ӌ(j��)�͌�(sh��)�F(xi��n)
��(w��n)����IƼ���S���壬֧����
(�������I(y��)��W(xu��)���������710072)
ժҪ����(sh��)�(y��n)��(bi��o)���(q��)��(d��ng)��̖(h��o)���}�_�����c��C(j��)��λ��֮�g�Č�(du��)��(y��ng)�P(gu��n)ϵ�������C(j��)�г�푑�(y��ng)�r(sh��)�g������C(j��)��Ƕ��г̷ֳ��������gС�г̽����{(di��o)��(ji��)���C��푑�(y��ng)�r(sh��)�gЧ��(y��ng)���Æ�Ƭ�C(j��)���l��Ӳ���Д��ȫ�ֵ��Д�Ӌ(j��)��(sh��)�M(j��n)�Д�(sh��)��(j��)���^�팍(sh��)�F(xi��n)����(g��)�ֲ��A�εĕr(sh��)��ƥ�䣬ݔ��ͨ��Ӳ��ʹ������(y��ng)�Ĕ�(sh��)��(j��)���®a(ch��n)ţ����(g��)�A�ε�PwM��̖(h��o)��ԓ����ֱ�^���㣬�܉�ɹ���(sh��)�F(xi��n)13·��C(j��)�ĺ���(w��n)�(q��)��(d��ng)��
�P(gu��n)�I�~��PwM��푑�(y��ng)�r(sh��)�g���}������C(j��)����Ƭ�C(j��)
�ЈD���̖(h��o)��TM383��4 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2IlIl8)12��0043��03
0�� ��
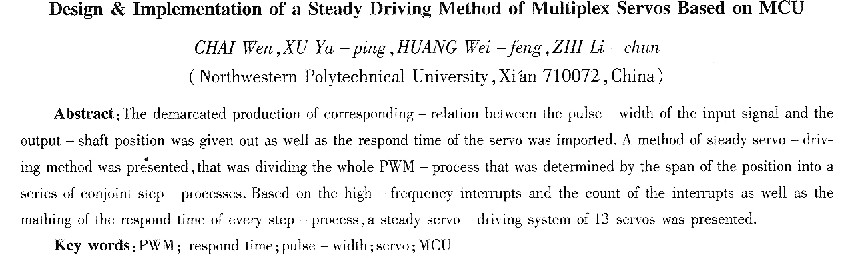
��ֱ����λ���ŷ�늄�(d��ng)�C(j��)���ַQ��C(j��)���ں�ģ���C(j��)�������P(gu��n)�I(l��ng)�������V����(y��ng)�á���C(j��)�֞锵(sh��)�ֶ�C(j��)��ģ�M��C(j��)�����õ�ģ�M��C(j��)����ֱ��늄�(d��ng)�C(j��)��늉����^�����p���X݆�C(j��)��(g��u)�M�ɣ����Ƅt���û���λ���ŷ���PwM(�}���{(di��o)��)��̖(h��o)�M(j��n)���(q��)��(d��ng)��늙C(j��)ݔ���S��λ���cPwM��̖(h��o)���}���д_���P(gu��n)ϵ����Ҋ�Ķ�C(j��)�(q��)��(d��ng)ϵ�y(t��ng)�ǽo���c(di��n)λ���Ƶ�PwM��̖(h��o)�����г��^��r(sh��)��C(j��)���\(y��n)��(d��ng)�^���в���a(ch��n)������(d��ng)������(d��ng)�Լ��^����Դ�ڔ_�������xɢ��(bi��o)����C(j��)�Sλ���(q��)��(d��ng)��̖(h��o)���}�����P(gu��n)ϵ���y(c��)����C(j��)푑�(y��ng)�r(sh��)�g�Ĕ�(sh��)��(j��)ָ��(bi��o)������(j��)���O(sh��)Ӌ(j��)һ�N���Ԍ�(sh��)�F(xi��n)���ж�·��C(j��)�^ƽ��(w��n)�(q��)��(d��ng)��ܛ���㷨���������AVR��Ƭ�C(j��)�O(sh��)Ӌ(j��)����C(j��)ƽ��(w��n)�(q��)��(d��ng)ϵ�y(t��ng)��
1��C(j��)����
��C(j��)�ă�(n��i)���Y(ji��)��(g��u)����ֱ��늄�(d��ng)�C(j��)���X݆�p�ٙC(j��)��(g��u)���λ���^���Լ������·�ȣ�ֱ��늄�(d��ng)�C(j��)����ݔ����(j��ng)�p�ٙC(j��)��(g��u)�Ե��ٴ�Ť�ص���ʽݔ��������ʹ�õ�Futuba��C(j��)����50 Hz��TTL�ƽPwM��̖(h��o)�(q��)��(d��ng)��0��5��2��5 ms���}����(du��)��(y��ng)��C(j��)O��180�����Sλݔ������C(j��)����ԭ����Dl��ʾ���Dl����̖(h��o)�{(di��o)���·�a(ch��n)ţ����20 ms���}��1��5 ms�Ļ���(zh��n)��̖(h��o)����
ݔ����̖(h��o)�c����(zh��n)��̖(h��o)���^�õ�ֱ��ƫ��늉���ԓ늉��c�λ������늉�����^���õ��m��늉��(q��)��(d��ng)늙C(j��)�D(zhu��n)��(d��ng).늙C(j��)�D(zhu��n)��(d��ng)�������D(zhu��n)�λ��ݔ��׃����ֱ���m��늉�����늙C(j��)ֹͣ�D(zhu��n)��(d��ng)��ģ�M��C(j��)������λ�ñ��ֹ��ܣ�ʧȥPwM��̖(h��o)���Դ��̖(h��o)�е�����һ��(g��)����(hu��)���λ�ò��_���ԡ��a(ch��n)����C(j��)����Ҫ��PwM��̖(h��o)�ж�N��ʽ[3-5]���Æ�Ƭ�C(j��)���a(ch��n)����·��C(j��)������̖(h��o)���ɱ��͡�ͨ���Ժã���Ŀǰ�õ��^��ķ�ʽ��ֻҪ�O(sh��)Ӌ(j��)�����o�������܉�?q��)��F(xi��n)��·��C(j��)���_�ɿ��ҷ�(w��n)���Ŀ��ơ�
���ĽY(ji��)��AVR 8λ��Ƭ�C(j��)ATmega8�����c(di��n)�O(sh��)Ӌ(j��)��һ�N�Ķ�·��C(j��)ƽ��(w��n)�(q��)��(d��ng)���Ʒ�����
2��C(j��)ݔ��ݔ�����xɢ��(bi��o)����푑�(y��ng)�r(sh��)�g����
2.1��C(j��)ݔ��ݔ�����xɢ��(bi��o)��
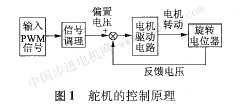
Futuba��C(j��)�Y���е��c(di��n)λ�P(gu��n)ϵ��
����ģ�M��C(j��)�����������^�ͣ���Ԫ�����ą�
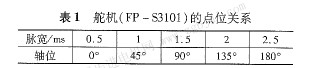
��(sh��)����(zh��n)����˴ֵ�ģ�M��C(j��)ݔ���Sλ���(q��)��(d��ng)��̖(h��o)���}�������ɇ�(y��n)��ľ����P(gu��n)ϵ��������O(sh��)Ӌ(j��)��C(j��)���(q��)��(d��ng)ϵ�y(t��ng)֮ǰ��(du��)��C(j��)�Sλ���(q��)��(d��ng)��̖(h��o)���}��ֵ������(bi��o)������(d��ng)�}����O.5��2.5 ms����֮��r(sh��)��C(j��)���������Ĺ�����B(t��i)����?y��n)��Ĝp���X݆�����һ��(j��)�ǰ�A�X݆�����г�����180��������(n��i)��
��(bi��o)����(sh��)�(y��n)�І�Ƭ�C(j��)�Ķ��r(sh��)���Ȳ�ȡO��1 ms�ķֱ��ʣ�O��5��2 5 msӋ(j��)21��(g��)��(bi��o)���c(di��n)��ÿ��(g��)��(bi��o)���c(di��n)���_������(y��ng)PwM��̖(h��o)�����Õr(sh��)�g����C(j��)��(w��n)���oֹ�����õ��Ĕ�(sh��)��(j��)�M(j��n)
����������D2��ʾ��
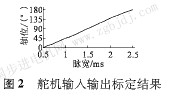
2.2����푑�(y��ng)�r(sh��)�g
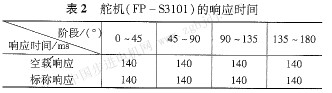
�O(sh��)��C(j��)��ijһ��ʼ�SλP��(�Ƕ�)�������SλP1(�Ƕ�)��(du��)��(y��ng)��PwM��̖(h��o)���������\(y��n)��(d��ng)��P1λ�ã����ԓ�г�s=1|P1һP0|����ĕr(sh��)�g����ԓ�г̵�푑�(y��ng)�r(sh��)�����ɜy(c��)���oՓ�г�5��Σ��������Sλ��(du��)��(y��ng)PwM��̖(h��o)���m(x��)2 s(100��(g��)����)����C(j��)�_���_(d��)�������Sλ���y(c��)ԇ��C(j��)�ڿ��d�͘�(bi��o)�Qؓ(f��)�d�ɷN��r�°���1���c(di��n)λ�\(y��n)��(d��ng)������(g��)�A�ε�푑�(y��ng)�r(sh��)�g����D2��ʾ��
���]PwM��̖(h��o)�������ԣ��y(c��)ԇ�������£�������Ɔ�Ƭ�C(j��)�ȏ�I��Oݔ����ʼ�SλPwM��̖(h��o)100��(g��)���ڣ���ݔ�������SλPwM��̖(h��o)N��(g��)���ڡ�ͨ�^�ij����Ђ�(g��)��(sh��)N�ɴ�С���õ����_(d��)�����Sλ�ģ�N����Сֵ�������׃PwM��̖(h��o)�}����ָ��ռ���뼉(j��)�r(sh��)�g�ɺ��Բ�Ӌ(j��)��
|