����S��ģ�������Ԍ�������
����\1����С��2��ꐼ��t2
(1�����ƌW���g��W�������Lɳ410073��2�A�пƼ���W��������h430074)
ժҪ��ᘌ�����S�T��С�������܅����_�ӵ����c���r����ģ�����ƵĿ����㷨����ģ�͵���ه��С���������Æμ��μ��ٷ���ģ���㷨�еą����M���Ԍ���������ʹ������S�܉�˷����텢���_�ӵ�Ӱ푣�ʼ�K�����^�õĿ������ܡ�����͌��Y���C�����㷨�Ŀ������cֹ�_�ԣ�
�P�I�~��ģ�����ƣ��Ԍ���������S
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004��7018(2008)12һ46һ03
0�� ��
����S�Ǹߙn���ؙC������Ҫ��������׃�l늙C(��ǰ����S���õ�늙C�^�����߀�����ஐ��늄әC)�c�C�����S�϶���һ��늙C�Ŀ����D���c�C�����S�Sоֱ���b���һ�w�������c���S��Ԫ�Ě��w�b���һ�w�������F��׃�l늙C�͙C�����S֮�g�ġ�����ӡ������ă��c�ǽY�����ξo����Ч�ʸߡ����͡����С������ʡȥ�����g������Ƥ�����ӵȭh���������F���١������٣��D�ӑT��С�����F���c�x܇��c�S���ӵȹ��ܡ�Ҳ�������������D�ӑT��С��ԭ������������늙C������S�������Ĕ_�Ӻ��ⲿ�ɔ_����������ؔ_�Ӹ������С����������Ɣ_�ӳɞ�����S����ƽ���\�к��{�ٵ��P�I��Ŀǰ�ĺܶ��㷨�ǻ���ģ�͵Ŀ��ƣ���Ҫ�������ʴ_���R������������S���f�����D�ӵ���������r׃�ģ��S�ضȵ����߶����ߣ��������㷨�^����ه��ģ�ͣ��t�����¿��������½�������ʧ�ء�ģ�������㷨��ģ����ه�Ժ�С�������m���Ժ�����ģ��Ҏ�t���ƶ���Ҫ�����Č��ȥ����������߀���y�_��****�����Ч�������������ͨ�^��׃�{�����Ӂ��M��ģ�������ķ�����
1����Sģ���{��
l.1ģ���{��ԭ��
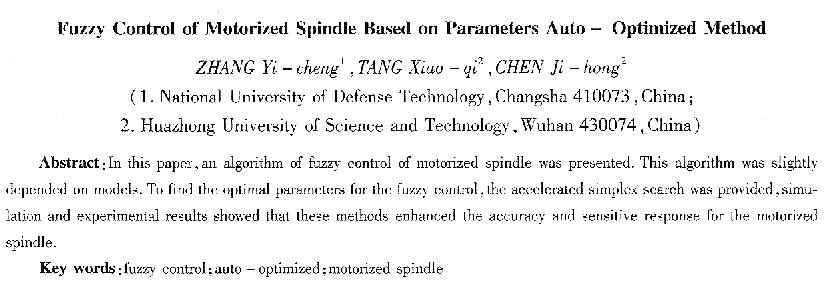
����ʸ�����Ƶ�ԭ����늙C�����Dd��q�S�������D�ӵĴ���ϣ��t���F��****�̶ȵĽ��ids���Ƅ�ŵĴ�С����iqs�����D�صĴ�С��ͨ�^����]�h�������M�п���푑���ģ���㷨��ԭ���nj�늙C���ٶ��`��E���`�����cEͨ�^�wһ��̎����ݔ�뵽ģ���������У����^ģ���Q�ߺ�������ͨ�^��ģ�������_���������Ĵ�Сdu�����wһ��̎�����e
�ֺ�õ�������̖iqs���˵���׃��������D�ٵ��]�h���ơ�
�`�ٶȺ����N��^�࣬���^���ε����������`�ٶȺ��������ăɂ�ݔ��׃����һ��ݔ�������x����ʽ��ͬ���������`�ٶȺ�����
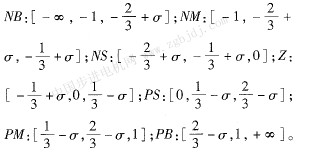
���xģ�������£�
���У�PB=����PM=���У�PS=��С��z=�㣬NB=ؓ��NM=ؓ�У�NS=ؓС��
����Ե�Փ��飺
�� �Q��ģ���{�����ӣ���1����2����3�քe��ݔ��e��ce����ݔ��du���{�����ӡ��鹝�sƪ�����D2ֻ�@ʾ��ݔ����e�ڲ�ͬ�{���������������`�ٶȺ�����
��l����49�lģ��Ҏ�t���ɂ�ݔ����e��ce��һ�����lҎ�t�����������������`�ٶȺ������D�����`�ٶ�ֵ��i(e)�ͦ�i(ce)����ȡMamdani��������ÿ�lҎ�t�����á��c������(����С)���õ����lҎ�t�µ�ݔ��ֵ�����_���DOFi,i=1,2��...��49����ģ���Pϵʽ��ʾ������
ͨ�^���ɵõ�ÿ�lҎ�t��ݔ��ֵdui��
�����ķ���ÿ�lҎ�t��������ݔ��ֵ�M����࣬�õ����ľ��_ݔ���������Ƿ�ģ�����^�� 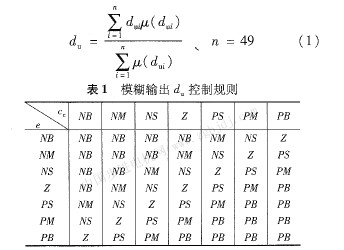 1��2�������`�ٶȵ�ģ����ԭ��
��D2��ʾ������=O�r(�D2a)���`�ٶȺ����nj��Q�ģ���>O���<O���t�`�ٶȺ����ֲ��������෴�ăɂ������M�е� |