����ʸ���M�ϵ�ֱ���D�ؿ���ϵ�y���OӋ�c����
�ճ���������
(���ϙC��I���g�WԺ�������Lɳ410151)
ժҪ������SVPWM�ķ�����늉�����׃����6������늉�ʸ���M�о��ٽM�ϣ��õ�6���ϳ�늉�ʸ�����ڴ˻��A�ϣ������OӋ��һ�N���ஐ��늄әCֱ���D�ؿ���ϵ�y����MATLAB��SIMULINK�h���½���ԓϵ�y�ķ���ģ�ͣ�����Y��������ϵ�y�Ĵ�朡��D���}��С������C��С���������õĄӑB���ܺͷ��B���ܡ�
�P�I�~�����gʸ���}���{��(SVPWM)��ʸ���M�ϣ�ֱ���D�ؿ���(DTC)������늄әC
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004��7018(2008)12��0049��03
0�� ��
����늉�����׃����8�N�����_�P��B����ӳ�䵽�C������D�Qƽ��(d-qƽ��)�ϣ�����6������늉�ʸ����2����ʸ�������y�����ஐ��늄әCֱ���D�ؿ���ϵ�y��ÿ���������ڃ��x��8��ʸ���е�ijһ����ȥ������׃���ͮ���늙C���Ķ������Ӵ�机��D�ؿ����������Ĝ��h���ȡ�����늉�ʸ���Ă������ޣ�������d��qƽ���ϵķֲ����B�m��λ�û���60������˲��ɱ���،��´�朡��D�ص��}���^������C���^��ʹ늙C�a����ϣ����������ӡ����˽�Q�@һ���}�����IJ���SVPWM�ķ�����6������늉�ʸ���M�о��ԽM�ϣ��õ�6���ϳ�늉�ʸ����Ȼ���ڴ˻��A�ϣ������OӋ��һ�Nֱ���D�ؿ���ϵ�y�������MATLAB��SIMULINK�h���½���ԓϵ�y�ķ���ģ�ͣ����M�з��挍���C��
1늉����gʸ���ľ��ԽM��
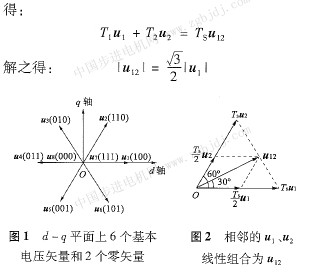
늉�����׃����6������ʸ���̓ɂ���ʸ����d��gƽ���ϵķֲ���D1��ʾ������SVPWM�����ɂ�����ʸ����һ����ʸ���M�о��ԽM�ϣ��ɵõ���һ������һ��ֵ�ĺϳ�ʸ���������@һ˼·�����������ăɂ�����ʸ�����������Ľ�ƽ�־������M�о��ԽM�ϣ��ɵõ�һ���ϳ�ʸ�������ֵ�t�Ƀɂ�����ʸ�������Õr�g�Q����
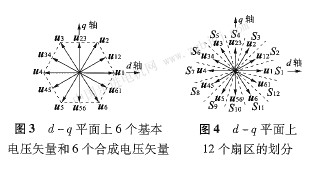
��������u 1��u 2���ԽM�Ϟ�u 12�������O�ɘ����ڞ�T s��u 1�����Õr�g��T 1��u 2�����Õr�g��T 2����  ��D2��ʾ����������ƽ��ԭ�t�� ������ƣ��ɵ�u23��u34��u56��u61����D3��ʾ��������x���@12��늉�ʸ������d��qƽ�愝�֞�12���ȅ^��ÿ���ȅ^�ķ�����30�����քe��s1��s12��ʾ����D4��ʾ��
2ֱ���D�ؿ���ϵ�y���OӋ
2.1���w�OӋ
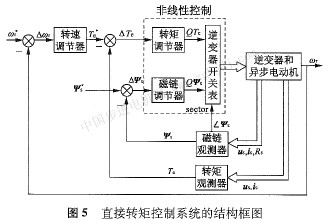
ϵ�y�ĽY����D��D5��ʾ����׃���ͮ���늄әC��ҕ��һ�����w�����ϵ�y��Ҫ�ɴ�机��D���^�y������机��D���{��������׃���_�P�����ֽM�ɣ����д�机��D���{��������׃���_�P�혋�ɷǾ��Կ�������
�D�ٽo��ֵ��r�c����ֵ��r�M�б��^���õ��`��ֵ����r�������D���{������ASR��ݔ�롣ASR��ݔ�������D�ؽo��ֵTe���D�ؽo��ֵTe�c�^�yֵTe�б��^���õ��`��ֵ��Te�������D���{����ATR��ݔ�룬ATR��ݔ��QT��������׃���_�P����OӋ����֮һ��QTe=һ1Ҫ��pС�D�أ�QTe=OҪ����ʸ��ֹͣ�������D(�������D)��QTe=lҪ�������D�ء���朷�ֵ�o��ֵ��s�c�^�yֵ��s�M�б��^���õ��`��ֵ����s���������{������ݔ�룬����{������ݔ��Q��s ������׃���_�P�����OӋ����֮����Q��s=OҪ��pС��朷�ֵ��Q��s=1Ҫ�������朷�ֵ���ɴ�朽Ƕ��^�yֵ<��s�ɵõ����ʸ����s���ڵ��ȅ^sector��sector������׃���_�P�����OӋ����֮�����C��QTe��Q��s��sector�@�������������پC����һ���ɘ�������ʩ�ӵ�늉�ʸ��us(nһ1)���Ϳ��Դ_�����βɘ���������ԓʩ�ӵ�
늉�ʸ��us(n)��
��ˣ�ϵ�y�OӋ��������Ҫ���}�ǣ�(1)��机� |