����dSPACE���ŷ�����ģ�͌��r�����о�
��iչ����С�������y��
(�A�пƼ���W��������h4300174)
ժҪ������dSPACE�M��ϵ�y�������ŷ�ϵ�y���r����ƽ�_�����ŷ�����������h����ٶȭh������������λ�íhǰ�����ƵȆ��}���о������OӋ�������Ŀ����㷨�ͷ���ģ�ͣ������ј�������ƽ�_��ܛӲ���h�����M���˿���ģ�͵Č��r�����о����õ��˝M����ŷ����ƽY���Ϳ��ƅ���һ
�P�I�~���ŷ����ƣ�dSPACE�����r���棻����ģ��
�ЈD���̖��TM383��4 �īI���R�a��A ���¾�̖��1004-7018(2008)09��0025һ03
0 �� ��
�ŷ�����ϵ�y�OӋһ�㽛�v���x�����浽����������ԭ����C���_�l���̣��S�����N�ŷ����Ʋ��Բ���ӿ�F���@�N�_�l�����Ѳ��ܝM������㷨��C�Ϳ�����ԭ�͘O�����ܜyԇ�ȑ�����Ҫ����횲����µļ��g�ֶΡ����r��������u�ɞ���N����ϵ�y�OӋ����Ҫ���ߣ����r������ָ�Ќ����������·������ģ�͵ĕr�g�˳��c�挍ϵ�y�ĕr�g�˳���ȫ��ͬ�ķ���[1]�����ڌ��r�����ڷ����·�н������y�Խ������_���Wģ�͵IJ��������˷���Y�������Ŷȣ����Ҍ��r�����܉����㷨��ϵ�yģ�����\���^���еľ��w��B�M�Мʴ_�������������˽�ϵ�y�������ṩ����Ч;����
���Ì��r���漼�g�M���ŷ�ϵ�y�_�l�����H���Կ��ٌ������㷨�M����C�����r�����OӋȱ�ݣ��s���аl���ڣ����ҿ��Ԍ�����ԭ���M�ИO�ޜyԇ��ȫ�濼��������_�l�|���Լ������㷨�ɿ��̶ȡ�����ᘌ��ŷ�ϵ�y�������_�l��Ҫ���������ŷ�ϵ�y���r����ƽ�_�����ژ�����ƽ�_�Ќ��ŷ�ϵ�y�����㷨�M���ˌ��r�����о����õ��^��M����ŷ����ƽY���Ϳ��ƅ�����
1���r����ƽ�_����
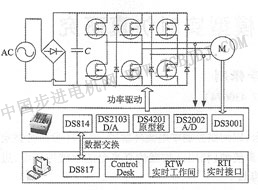
dSPACE���r����ϵ�y���ɵ�dSPACE��˾�_�l��һ����MATLAB��simuilnk�Ŀ���ϵ�y�OӋ���yԇ�õĹ���ƽ�_�����F�˺�MATLAB��simulink�h������ȫ�o�p�B��[2]����MATLAB��dSPACE����h���У����Է�����M�и��N�����㷨�OӋ�����a�Ԅ����ɺͳ������d�\�У��s���ˏ�ģ���OӋ��������C���^�ɕr�g�����H��ˣ�dSPACE���r����ϵ�y߀�ṩ�˶�N�����ɿ���Ӳ���ӿڿ������Ԍ����N�������P����������ƽ�_�����������Ŀ��ƻ�·��ʹ�õ�����C�Y�������c���H�\����r��ͬ�����Ŷȣ���ˣ�dSPACE����ϵ�y�܉��^�õ؝M���ŷ�ϵ�y����ģ�͌����r����ƽ�_�Ĺ��������ĸ����ŷ������^����̖�ӿ�Ҫ���x������DSl005̎���������ģ��x����DS2002��DS2103��DS3001��DS4201�ȔUչ�ӿڿ���dSPACE�M��ϵ�y�Լ��ŷ�늄әC������ģ�K��ͬ�������ŷ�����ģ�͌��r����ƽ�_������ƽ�_��Ӳ���Y����D1��ʾ��
�ڈDl�У�ͨ�^dSPACE�M��ϵ�y�еĸ��NӲ���ӿڿ����ŷ��������P��ݔ��ݔ����̖�����댍�r����ƽ�_��dSPACE�M��ϵ�y���ŷ�늙C�����
�D1���r����ƽ�_Ӳ���Y���D
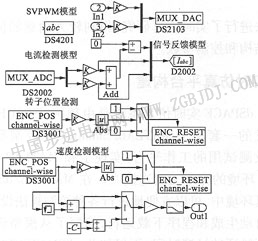
�Ә�����һ�������������ŷ����ƻ�·����������ŷ������^�̌� ����횘����܉��M��Ӳ�������Ľӿڷ���ģ�ͣ�ͨ�^ģ�́팦���N�ӿ���̖�M��̎�����õ���ݔ����������̖�����ŷ�ϵ�y��������Ҫ�Ľӿ�̎��ģ��һ�������ׂ����֣��D��λ�Ùz�yģ�͡���������z�yģ�͡�늉����gʸ���a��ģ�ͺ��ٶșz�yģ�͡����������ӿ�̎��ģ�͵Ĺ�������������dSPACE�ṩ�İ忨���ú����OӋ�ˌ����Ľӿڷ���ģ�͎죬��D2��ʾ��ͨ�^�{�Ì����Ľӿ�ģ�Ϳ��Ԍ��F�����㷨����Ľӿ���̖������̎���^�̡�
�D2���r����ӿ�ģ�͎�
2����ģ�͌��r����
����dsPAcE�Č��r�����^��һ��������ׂ����E��
(1)���������^�̼����،�����������OӋ���Ʒ�������������ģ�ͣ�
(2)������ģ�Y�������Ì��r�������������Ɍ��r���a���Ԅ����d��dsPAcE�M��ϵ�y�У�
(3)��dsPAcE�ṩ�ľC��ԇ��c�yԇ�h��ܛ��controlDesk���Ԅӌ������{��ܛ��MLIB/MTRACEܛ�������r���攵���M�Ы@ȡ�� |