����DSP��ģ�M��Cλ���ŷ�ϵ�y�OӋ�c���F
������x���
(�������I��W���������710072
ժҪ��ᘌ��w�C��C�ӿ���ϵ�y��B�˻���DsP�ğoˢֱ��늄әCģ�M��Cλ���ŷ�ϵ�y��Ӳ���M�ɡ�ܛ���OӋ������ԭ���C���\����PI�{���ͷe�ַ��xPTD���������㷨��ʹ��labwindows/CVIܛʲ������λ�Cܛ����ϵ�y�ĸ��S�����M�Мyԇ�yԇ�Y������ԓϵ�y푑��ٶȿ죮�����^�õĿ������Ժ͌��Ãrֵ��
�P�I�~����C��λ���ŷ���labwindows/CVI��PID�㷨
�ЈD���̖��TM383��4 �īI���R�a��A ���¾�̖��1004��7018(2008)09 0028��03
0����
1Ӳ���OӋ
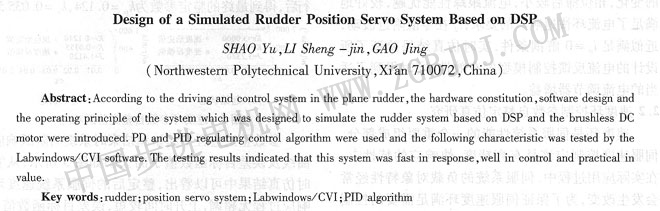
��C�ǿ����w���������\�ӵ��ŷ����ЙC���������w�C�����ƫ�D�Ķ������w�C���w�Р�B�������OӋ����һ�N�w�C��C��ģ�Mλ���ŷ�ϵ�y��ϡ�����şoˢֱ��늄әC����һ��ͬ�S���b�Ľ�λ�Ƃ������M��DSP30F6010������ƺ��ġ�ԓϵ�y�܉F��Cϵ�y����Ҫ���܅����yԇ��ԇ���������D���ơ��ٶ��B�m�{������Ƕ��Ԅ���λ�Լ����սo��ƫ�D�ǿ��١��������ʴ_�ĸ�ۙ��ͬ�r���Ԝy��늙C�Č��r�D�١�ϵ�y���l��푑��ȅ����������^���^���r߀���й��ϱ��o����һ��λ�Cܛ������Labwindows/(CVI���_�l�h����Ҫͨ�^RS422����ͨ���M�Д����l�ͺͽ����ṩ�ھ����r�yԇ���O�ø�׃ݔ����̖�����P�����Ķ�ʹϵ�y���Ќ�������D1��ʾ
1��1���ؼ����ģ�K
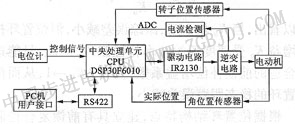
����Ԫ�����b��늙C�Ȳ��z�y�D�ӴŘOλ�û�����̖PA��PB��PC�քe�cDSP������ģ�M���_���B��ģ�M���_�O�Þ锵�ֽӿ�ͨ�^�a��PWM�Д���Q���Q��DSPͨ�^PWM���_�����·(��ϵ�y�x��IR2130)�B�ӵ������P�܌��F���lPWM�͓Q����ơ��OӋ����·ģ�M����ݔ��քe�ǽo��λ����̖��늙C���Hλ�÷�����̖���Դ늉��z�y��̖ģ�M����ݔ��քe���^���x�Լ��V������DSP������߀����Ѓɂ�ָʾ���ָʾϵ�y���\�Р�B���D2ֻ�o����һ·ģ�M���c������̖��ݔ��D��
�D2ģ�M��ݔ���c������̖ݔ��ԭ��D
���ڱ�ϵ�y����^�麆�Σ�ֻ��Ҫ�ɷN�Դ��̖��ͬ�r���]ţ�a�ɱ����_�l�����Լ�������r��K�����^�麆�εľ����Դ��ϵ�y����24 V���ͨ�^L7815(15 V)�o��оƬ����ٽ��^���͉����LM1117(5 V)�o���ಿ�ֹ�늡�
1 2���·�OӋ
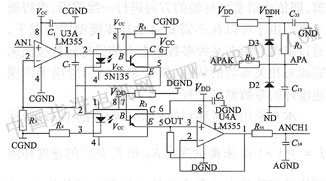
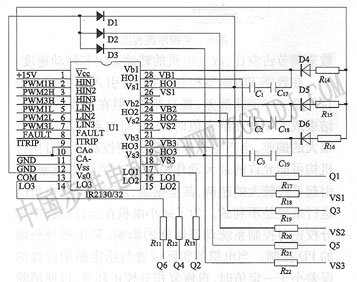
��D3��ʾ��оƬ�x��IR��˾��1R2130оƬͬ�r�����������ʹܵČ�ͨ���P�����·�dz����Ρ���ͨ�^1-LM7815�������õ��ĩ�15 V�Դ��C1�����e��ݞ��Ϙ�۹��ʹ��ӵđҸ��Դ�惦����D4�����÷�ֹ�Ϙ�ی�ͨ�r
�D3���·ԭ��D
��ֱ��늉���ĸ��늉���IR2130���Դ�϶�ʹ�����p�����D4�������ķ����͉���Ȼ����D4�cC1�������˝M�����·���ʹ��_�P�l�ʵ�Ҫ��D4���x���ٻ֏Ͷ��O�ܡ�R 17��R 12�� |