����C8051F320�ğoλ�Â������oˢֱ��늄әC���Ƽ��g
�w�������l�����T�����O�y��
(�������I��W���������710072)
ժҪ����Bһ�N����c8051 F320�ğoλ�Â������oˢֱ��늄әC����ϵ�y���OӋ��ϵ�y���÷�늄��^��z�y���_���D��λ����Ϣ�����r�ٶȡ�������p�]�h���ơ��Y��c805l320���еĶ��C9λuARTͨ��ģʽ������Labview 8. O���F�ˌ����_늙C�Ĝyԇ�cPI�����������ܡ��әC��������ԓϵ�y�Y�����Σ��\�пɿ����{������
���á�
�P�I�~���oˢֱ��늄әC���oλ�Â�������c8051F320��Labvlew 8. 0
O�� ��
�S�����Բ��ϡ������������Ϳ��Ƽ��g�İlչ���oˢֱ��늄әC�đ���Խ��Խ�V�����oˢֱ��늄әC�cֱ��늄әC�ͽ�������늄әC��ȣ����нY�����Ρ��{�����Ժá��o�Q������Ч�ʸߵ����c�����oˢֱ��늄әC�]�ГQ��������Ҫ��ȡһ����ʩ�@ȡ�D��λ����Ϣ�����@ȡ�D��λ����Ϣ�ķ���ͨ���ЃɷN��һ�N�Dz��Â������@ȡ�D��λ�ã��@�N�����������У������������ܭh��Ӱ푣��ڸߜصȭh���£����ܕ�������������ʧЧ��ͬ�r�B�Ӿ��^�ࡣ��һ�N�����Üy���õ��������늉���늙C�Ļ������̡��^�y����늙C�ķ�늄ݵȫ@���D��λ����Ϣ��
�ڵڶ��N�����У����÷�늄��^���c�@���D��λ����Ϣ�ġ���늄ݷ������ο��У���������ԓ�����OӋ��һ�N�������@�C�ğoλ�Â������oˢֱ��늄әC(���Q���@늙C)����ϵ�y�����Y��Labview 8. O��Ɍ�ϵ�y�Ĝyԇ������������
1��늄��^��z�y
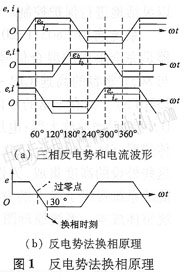
��늄��^��z�y����Ŀǰ���g����죬���F******������****�����D��λ�Ùz�y�������īI[1]ָ���ڷ����oˢֱ��늄әC�У��@�M��늄�����ؓ��׃�����β�����ij���@�M�ķ�늄��^��r���D��ֱ�S�cԓ���@�M�S���غϡ��ɈD1��֪��ֻҪ�z�y������늄ݵ��^���c�����t30o늽Ƕȣ��Ϳɫ@�Ì����ēQ���r�̣��@���Ƿ�늄ݷ��z�y�oˢֱ��늄әC�D��λ�ÓQ���ԭ����
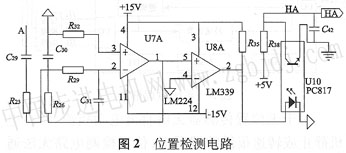
��ϵ�y���@늙C���w�ь��о���������������λ�Ùz�y�·����ԫ@��늙Cλ����̖���D2��늙CA���@�Mλ�Ùz�y�·�����������cA��ͬ��
���ڲ���PwM��ʽ��A���������и��l�{����̖��Ӱ�늉����^�������������������Ҫ���ÞV��������늉���̖A�M�ОV�����D2�ОV�������Q�������õ��ķ�����̖�ܷ�ʴ_�ط�ӳ�D��λ�ã������OӋ�rҪ����ע�⡣���ȣ����C�V���������ƱM��С���D2�в��õĞV���·���ƺ�С�����z�y����̖Ӱ�Ҳ�^С����Σ���Ԫ��������һ�����`����x��R��cԪ���r�������C�����������������ֵ��e��С����t�����������V����������Dz�һ�£��Ķ���늙C�\������������Ӱ푡�
2����ԭ��
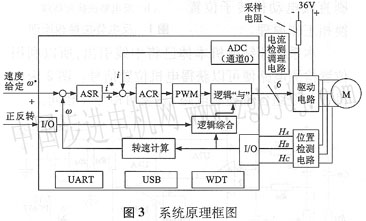
ϵ�y������������ƭh���ٶȷ������ƭh�����p�]�hϵ�y��늙C�D��ͨ�^��Ƭ�C�z�yλ�Ùz�y�·�@�õ��D��λ����Ϣ��HA��HB��HCӋ��õ���ϵ�y�ăȭh����h���Ɇ�Ƭ�C�����ٶȽo��ֵ�c����ֵ���^�\��õ�����o��ֵ�����H�錦����늙C�o��늉�ֵ���ȭh������h�����ٶȿ�������ݔ������o��ֵ�c���ɘ����ɘӺ���A��D�D�Q�õ������ֵ��ͨ�^�m����PI�㷨���o��������PwM��̖�����F늙C�{�١�늙C���D������ɽo����̖����Ƭ�C̎������ƌ����_�P�܌�ͨ�����������D���ܡ����ڌ�M0sFET�Č��H����ɘ���r�͵���Ƭ�C������������\��������^�o��ֵ�r����Ƭ�C�����`����M�б��o���ơ�
ϵ�y�x��c8051F320������ƺ��ġ�ԓ̎��������ȫ���ɵĻ����̖ϵ�y��оƬ(soc)�������c8051���ݵĸ���cIP-5l�Ⱥ�(�\���ٶȸ��_25MIPs)�������S����Ƭ�����YԴ�����ϼ�����A��D���ɾ�������Ŵ�����늉����^����늉����ʡ��ضȂ�������SM Bus��12c��usB��uART��PcA�����T���ȡ��@Щ���O�ĸ߶ȼ��ɣ����OӋС�w�e�����ġ������ܵ�ϵ�y�ṩ�˘O��ķ��㣬ͬ�r���Դ��ϵ�y���w�ɱ���ϵ�yԭ��D��D3��ʾ��
���ڟoλ�Â������oˢֱ��늄әC���ԣ���늙C�oֹ���D�ٺܵ͵���r�£�λ�Ùz�y�·�o��ͨ�^�z�y��늄��^���c�ʴ_�@���D��λ����Ϣ�������Ҫ����һ�������ӷ���ʹ늙C�\�D�����Է����@�÷�늄��^���c���ٶȡ��������@늙C�D�ӑT��С��ͬ�r���]�ɱ������s�̶ȣ���ϵ�y����һ�N�_�h���Ӽ��g��� |