���ڶ��A��ģ�^�y��������ͬ��늄әC�ŷ�����
�ʸ��˹������l�����R����
(�������I��W���������710072)
ժҪ��ᘌ�����ͬ��늄әC�OӋ��һ�N���A��ģ�^�y����super-Twisting�㷨�������ڄӑB�^�yϵ�y�Юa�����A��ģ��B�����ö��A��ģ�^�y���ă��c�ǿ��Ա�����ͨһ�A��ģ���g�еĶ��ӆ��}�������ӬF������ͨ��ģ���g�����еģ�ԓ����������ͬ��늄әC�Ŀ���Ч��ͨ�^Matlah��simlink�M���˷��挍
�P�I�~�����A��ģ���^�y�����д�ͬ��늄әC
O�� ��
����ͬ��늄әC���нY�����Ρ��w�eС�������p���p��С��Ч�ʸߵ����c���cֱ��늄әC��ȣ����]��ֱ��늄әC�ēQ�������ˢ���ɴˎ�����ȱ�c���c����늄әC��ȣ������ڲ���Ҫ�o�������������Ч�ʸߣ������ߣ����ؑT���ȴ�������Ͷ������p�ĜpС�����D�Ӆ����ɜy���������ܺá�Ȼ����ͬ��늄әC���h���зdz������Ҫ������ضȡ��Cе����Լ������\�Еr�����ŬF��Ȏ�����늄әC���Ɔ��}����˿˷�����ͬ��늄әC����׃���Ͳ��_�����ص�Ӱ푣����F�����ܿ��ƣ����Ќ��H�о����x��
���ڻ�ģ�^�y�����нY�����Ρ������ɔ_�ͅ����z�Ӿ��к��������Ե��S�����c��������ܵ������о��ߵ��ձ���ҕ��Ȼ������ģ�������ڲ����xɢ�����ɣ���˶���Ǵ��ڵ���Ҫ���}��ͨ����ͨ�V���������ڜpС�����}���s�������ӕr�����IJ��ø��A��ģ��ϵ�y�M�Р�B�^�y���ƣ��Ķ��pС����ϵ�y���l�xɢ���Ǝ����Ķ������Luenberger�^�y��ݔ�������`��ע��ӿ��Ք��ٶȡ�
1���Wģ��
��������ͬ��늄әC��d��q����ϵ�¿��������·���������
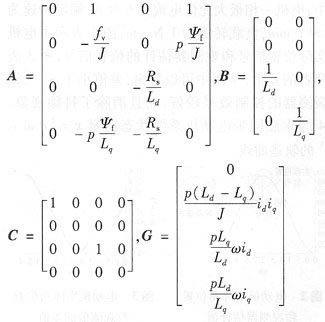
ʽ�У��Ȟ�늄әC�D�ӵĽ�λ�ã��؞�늄әC�D�ӵĽ��ٶȣ�id��ֱ�S�����iq�齻�S�������f�������w��朣�p��늄әC�O������Rs�鶨���@�M��裬Ld��Lq�քe��ֱ�S늸кͽ��S늸У�J���D�ӑT����fv��ճ��ϵ����c1��ؓ�d�D�أ�ud��uq�քe��ʾֱ�S늉��ͽ��S늉���
�O��B׃��x=[�� �� id iq]T������ݔ����̖u=[ud uq]T���t����ͬ��늄әC�Ĕ��Wģ�Ϳɱ�ʾ�ɞ����µķǾ���ϵ�y���g��B���̣�
ʽ�У����A��B��c���鳣����ꇣ�G(x��t)��ʾ늄әC�ķǾ��Բ��֡�
2���A��ģ����
���˱�����ͨһ�A��ģ���ƹ��еĶ��ӬF���Բ��ø��A��ģ���Ƽ��g��Emelyanov������������ˌ���ģ׃���ĸ��A�ֵ��^�c��������˶��A��ģ�㷨������Twisting�㷨��ԓ�㷨�ǰ�ָ���������Ք������^super-Twisting�㷨����ᘌ�ϵ�y��ģ׃�������P�Ȟ�1����ģ�ԓ�㷨��ȫ�����˶��ӡ�Levant�������ڶ��A��ģ�����У���ģ׃���c�_�P�ӕr�r�g��ƽ�����Pϵ�������һ�N���^�õĸ��A��ģ���Ʒ�����
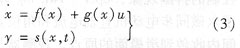
���˲�ʧһ���ԣ��O����ϵ�y���g��B���̞飺
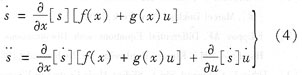
ʽ�У�x���B׃����u��ݔ�������̖��s��ݔ��������Ҳ������ģ׃����f��g��⻬�IJ��_�������������н硣���O���Ƶ�Ŀ����ʹs(x��t)�����㣬����ȡ�ֿɵã�
���x1���˕rr=2�����Q����A��ģ���ƣ���ģ׃��s(x��t)�Ķ��A��ģ��飺
���x2�����]�ǿն��A��ģ�棬�ֲ��e�֝M��Filippov�ж���Ҳ�����f�������xɢ�ӑBϵ�y��Filippov܉�E�M�ɡ�ʽ(3)�M��ʽ(5)�ėl�����Q���P�ڻ�ģ׃��s(x��t)�Ķ��A��ģ��
��ˣ�����B܉�E�ڻ�ģ��s(x��t)=O��s(x��t)=O�Ľ����ϕr��ʽ(3)��M�����P��s(x��t)�Ķ��A��ģ�������f�����Ɔ��}�ć����ԣ����O���l��������
(1)u���н粢���B�m�ģ�����ʽ(3)�Ľ��Ƕ��x��ȫ���r�g��t�ϵģ���������t��u(t)��U�������B�m |