�o(w��)ˢֱ��늄�(d��ng)�C(j��)��������z�y(c��)����
��������F�ţ������I���I(y��)��W(xu��)�����о���Ժ������518055��
ժҪ�����˙z�y(c��)�����o(w��)ˢֱ��늄�(d��ng)�C(j��)�@�M��(n��i)�a(ch��n)�����ص��������늙C(j��)�������������ăɃɌ�(d��o)ͨ���Ʒ�ʽ�r(sh��)��ᘌ�(du��)��׃������_(k��i)�P(gu��n)���{(di��o)�Ʒ�ʽ�������һ�N��������z�y(c��)��?f��)䡣������늙C(j��)�@�M�ڸ��N��B(t��i)�z�y(c��)����c늙C(j��)늴��D(zhu��n)�ص��P(gu��n)ϵ�����M(j��n)���ˌ�(sh��)�(y��n)�(y��n)�C�������͌�(sh��)�(y��n)�C����ԓ��?f��)��܉�?ji��n)�Ρ���Ч�ęz�y(c��)��늙C(j��)�������������(du��)����늙C(j��)�D(zhu��n)���}��(d��ng)������Ҫ���x��
�P(gu��n)�I�~���o(w��)ˢֱ��늄�(d��ng)�C(j��)������z�y(c��)��늴��D(zhu��n)�أ��D(zhu��n)�ز���(d��ng)
�ЈD���̖(h��o)��TM36+1; TP274+.5 �īI(xi��n)��(bi��o)־�a��A ���¾�̖(h��o)��1001-6848(2010) 01-0091-03
0 �� ��
�D(zhu��n)�ز���(d��ng)��(w��n)�}һֱ�ǟo(w��)ˢֱ��늄�(d��ng)�C(j��)�����I(l��ng)���о����P(gu��n)�I��(w��n)�}{1��2}����Ҫ��Ч������늙C(j��)���D(zhu��n)�ز���(d��ng)������Ҫ��(zh��n)�_�z�y(c��)����ӳ���ش�С�������Ŀǰ�����o(w��)ˢֱ��늄�(d��ng)�C(j��)ͨ�����������˲�r(sh��)ֵ��ĸ�����˲�r(sh��)ֵ�ķ�����(l��i)��(sh��)�F(xi��n)����]�h(hu��n)���ơ�ǰ����Ҫ3��(g��)��(d��)��������������Լ�����{(di��o)��(ji��)������(d��o)���·���ࡢܛ����(sh��)�F(xi��n)��(f��)�s�����ߺ�����늄�(d��ng)�C(j��)�@�M늸е��m(x��)�����ã��m(x��)���������׃�·��늄�(d��ng)�C(j��)�@�M���γɃ�(n��i)�h(hu��n)�����o(w��)��ͨ�^(gu��)���b��ĸ���ϵ�����������z�y(c��)��˳����������^(gu��)���[3]������ᘌ�(du��)�o(w��)ˢֱ��늄�(d��ng)�C(j��)ϵ�y(t��ng)��׃������_(k��i)�P(gu��n)���{(di��o)�Ʒ�ʽ�������һ�N��������z�y(c��)������ԓ����ͨ�^(gu��)��(ji��n)�ķ��������_�ؙz�y(c��)����늙C(j��)�@�M��(n��i)�a(ch��n)���D(zhu��n)�ص������
1��������z�y(c��)������?f��)?/B>
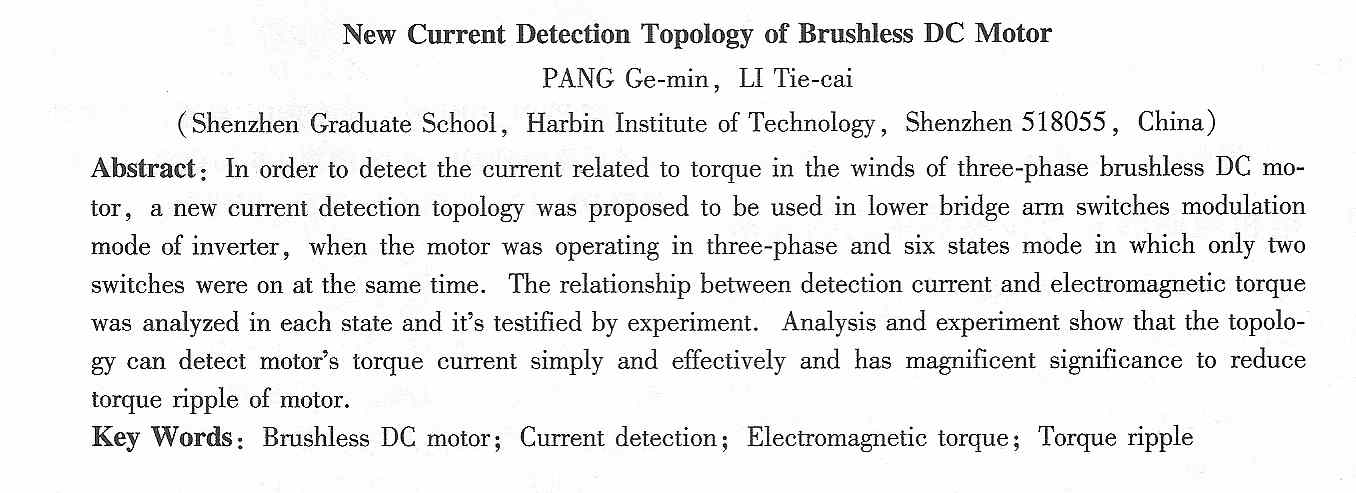
���������B�ӵğo(w��)ˢֱ��늄�(d��ng)�C(j��)�������������ăɃɌ�(d��o)ͨ���Ʒ�ʽ�����@�N���Ʒ�ʽ�£�����ᘌ�(du��)��׃���_(k��i)�P(gu��n)������{(di��o)�Ʒ�ʽ����(du��)���y(t��ng)����׃�·�����m��(d��ng)?sh��)ĸ��M(j��n)���������������z�y(c��)����������?f��)�Y(ji��)��(g��u)��D1��ʾ����ȦL1��L2�����i1��i2�����ԈD���]���ķ���?y��n)���������������z�y(c��)�����Йz�y(c��)�����D1�����i1��i2֮
�͡����z�y(c��)����M�㣺 i=i1+i2 (1)
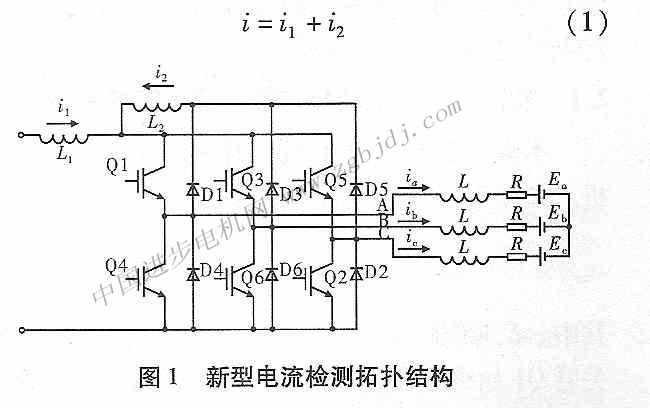
��(sh��)�F(xi��n)�����ӵľ��w�����飺��L1��L2����һ���p�@�����p�@�ڎ��К�϶�ĭh(hu��n)�δ��Բ����ϣ�ʹ�î�(d��ng)L1��L2���������?q��ng)D1��Ҏ(gu��)���������������(d��ng)�r(sh��)���ɂ�(g��)��Ȧ�a(ch��n)���Ĵň�(ch��ng)����һ�£���D2��ʾ��
�ڴ��Բ��ϵĚ�϶�а��b���Ի��������������ǂ�������ݔ��K���������ښ�϶�ň�(ch��ng)B������
����϶�ň�(ch��ng)B�c��Ȧ����P(gu��n)ϵ�飺
��ʽ(1) -ʽ(3)�õ���
�����������ݔ����ӳ�D1�����i1, i2֮��i��
2 늙C(j��)늴��D(zhu��n)���c������������P(gu��n)ϵ
�O(sh��)늙C(j��)������(du��)�Q��ÿ���@�M������ͬ�����Ժͅ���(sh��)��L���@�M���Ըкͻ���֮�R���@�M��
��裻Ea EbEc�քe��A��B��C�෴늄�(d��ng)��(sh��)��ia��ib��ic�քe��ʾÿ���@�M�������t��늴��D(zhu��n)�أ�Pe��늴Ź��ʣ�����C(j��)е���ٶȣ��t늙C(j��)늴��D(zhu��n)�ط��̞飺
���O(sh��)�o(w��)ˢֱ��늄�(d��ng)�C(j��)��B(t��i)�ГQ������Ξ�AB��AC��BC��BA��CA��CB��AB����D3��ʾ���D3�У����β��������B(t��i)��A��B��C���@�M�� |