һ�N���õIJ��M늄әC��׃�����ӿ������OӋ
����꣬�����֣����N
�������I��W������ɰ�710072)
ժҪ�������˲��M늄әC���}���{��ʽ������ԭ����ᘌ�������ʽ���M늄әC���O֭��һ�N����AT89c5l��Ƭ�C��PwM���D�ؿ�׃�����ӿ���������Ԕ���U��rܛ��Ӳ�����ֵČ��F�������Y��������ԓϵ�y���־��ȸߡ��\��ƽ������С���ԃr�ȸ��ҷdz����á�
�P�I�~����Ƭ�C�����ʽ���M늄әC�������ӣ�PwM
�ЈD���̖��TM383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)09��0031��04
O�� ��
���ʽ���M늄әC������ʽ������ʽ���M늄әC�ă��c��һ�������÷dz��ձ顣�����ܺ��ε�ֱ�ӽӵ���ͨ�Ľ�ֱ���Դ���\�D������Ҫ���T����������늙C���w�x������r�£��������ĺÉĺܴ�̶���Ӱ�������ϵ�y���\�����ܡ��������OӋ�Ŀ������ԃ�����ʽ���M늄әC�\�����Ԟ���l�c����AT89C51��Ƭ�C��DAC0832����ģ������nλ���ֺͺ����ȹ��ܡ����c���ʽ���M늄әC�����Դ��ظ��Ʋ��M늄әC���\�����ܣ��،��䑪���I�������ã�ͨ���ԏ���
1ϵ�y�Y������
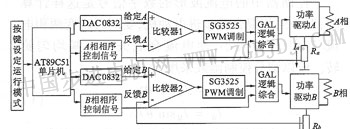
ϵ�y�Ɇ�Ƭ�C�����·�������·���ز������·�����c�����·��߉�C���·�����o�·�M�ɡ������Ŀ��ƺ��IJ���AT89C51��AT89c51ͨ�^��ݔ����̖�Д���^��ݔ���惦���нo��������εĿ�����̖����̖���^DAc0832�ͷŴ����D�Q��������ģ�M늉���̖��ԓ��̖��늙C�@�M�е�������^�ɘ�����D�Q�ɵ�늉���̖�M�б��^������
����̖���ڽo��늉����·�����Źܽ�ֹ����֮ʹ���Ź܌�ͨ���Ӳ��M늄әC��D��Aݔ����ͬ�Ŀ���늉����@�M�����^��ͬ�����ֵ���Y����D��Dl��ʾ��
�D1ϵ�y�Y����D
2�}���{��ʽ���ֿ���˼�����
������ʽ���M늄әC�ڵ����\�D�r������Ӻ������}���@��ȱ�c���������đ����I����늙C���w�ȶ�����r�£��҂�����ͨ�^�������M�Ŀ��Ƽ��g���˷�늙C�\���^���е��@�����}�������������Ôز������Ӽ��g�����Ի����������l����F���ü����Ӽ��gҲ�ɜpС��Ӻ�������Ŀ��߀�������늙C���\�D���ȡ�
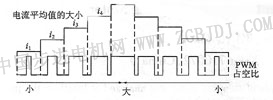
��ͨ���IJ��M늙C���·�У�늙C���@�M��ͨ�˵��Ƿ�����̖���������׃�ġ������ؾ�ʹ��늙C���\�Еr�������@�IJ��M�У�������^�����ֿ��ƾ���ʹ�@�M��ͨ�˵�����A�ݠ��������½����@����ÿ���}�_�ГQ�r���@�M���������ͻ׃�ġ��~������ֳɶ��ٴ��ГQ���D�Ӿ��Զ��ٲ������һ��ԭ�еIJ���ǡ���ϵ�y���õ����}���{��ʽ���ֿ��ƣ��ڈD1�Ќ��H��GAL�h�η�����ݔ�����������̖��С���A�ݲ��������}���{����̖(PwM)��PWM��̖ռ�ձ�Խ��ƽ�����Խ�𣬲�ͬռ�ձ�PWM��̖�ஔ��������ֵ���A�ݲ�����PWm��̖���ƹ��Źܹ���r�_�P��B���{�����ŹܵČ�ͨ�r�g������늙C���@�M��ƽ������Ĵ�С������PWM��̖�l���·��ʾ��D��D2��ʾ��
�D2����PwM��̖�l���·ʾ��D
3Ӳ���·�OӋ
3 1��Ƭ�C���؆�Ԫ��D��A�D�Q�·
��Ƭ�CAT89C5l����ϵ�y�����؆�Ԫ����������簴�I�o���Ŀ�����̖���������֙nλ���\���}�_�l�ʡ������D����ͣ����̖��Ȼ��ݔ���惦���������ļ������������̖���ٽ��^D��A�D�Q��ģ�M��̖��
�惦���е�������εĔ�����̖���@��Ӌ��ģ���n������ʽ���M늄әC��Ҫͬ�r��׃���������IA�ͣ�IB�Ĵ�С��ʹ����ϳ�ʸ���ȷ��������Dһ���Լ��ֿ��ƺ���������ʽ��
|