�����_�P����늄әC�D�ز��ӿ��Ʒ����C��
�Ǽt�ǣ��w�ܣ����㣬�܌�Ȫ �������I���I��W �����I150001��
ժҪ���_�P����늄әC�^�����������D�ز��ӆ��}�Ƽs���䑪�á����ͨ�^���Y�������_�P����늄әC�����D�ز��ӿ��Ƽ��g���P�īI����C���˽����_�P����늄әC�D�ز��ӵĿ��Ʋ��ԣ������ͽ�B�˸����Ʋ��Եă�ȱ�c��
�P�I�~���_�P����늄әC���D�ز��ӣ����Ʋ��ԣ��C��
��Ȧ���̖��TM352; TM301. 2 �īI��־�a��A ���¾�̖��1001-6848(2010)01-0078-08
0�� ��
�_�P����늄әC�mȻ����һϵ�Ѓ��c��������һЩ���}�д��о������D�ز��ӡ��F�ġ���ӡ����ȡ��cһ��늙C��ȣ��_�P����늄әC�D�ز������@�^���ɴ�����늙C�����D�ٲ��ӣ��Ķ���������ijЩ�����е��ƏV���á����ĸ����_�P����늄әC�������c���������_�P����늄әC�D�ز��Ӯa����ԭ�Y�χ��������P�īI���C���������_�P����늄әC�D�ز��ӵĿ��Ʒ�����ᘌ�ÿ�N���Ʒ������U���˸��ă�ȱ�c��
1�D�ز��Ӯa���C��
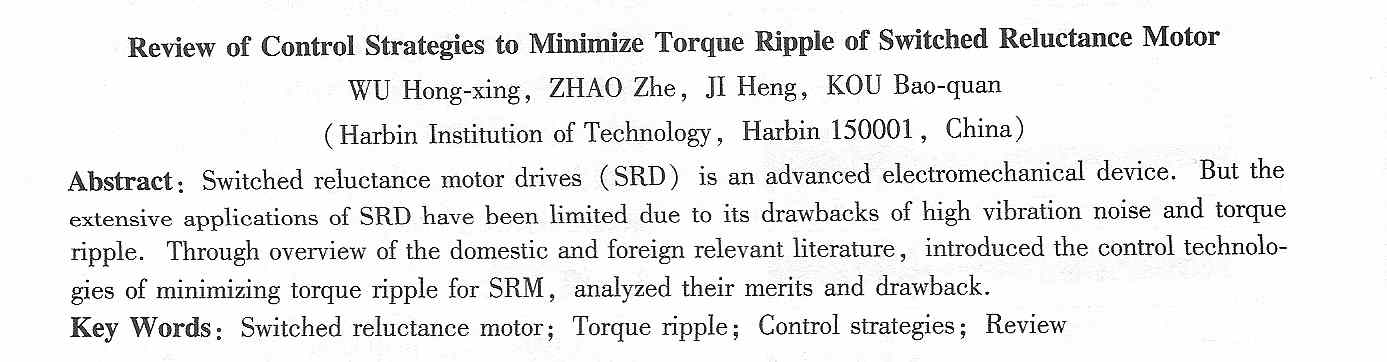
�����Ź���ԭ�����D�����κ�λ��һ���@�M�a���Ĵ����D�ع�ʽ���£�
ʽ�У��Ȟ��D�ӷ�λ�ǣ�i���������  ��Ź��ܡ� ���x��D1��ʾ�ĴŻ��{���·�����e�飺
���ض�����r�£��_�P����늄әC���ܴ��Ӱ푣��Ը��c������o�P�����ڴ�朦գ��ȣ�i��
�ɱ�ʾ�ɦգ��ȣ�i��=L���ȣ�i�����Ԯa�����D�؞飺
��������֪����ÿ���@�M������r�£�늙C�D�ӕr���ܵ�׃��������늴����͏���늴��������á�ʹSRM�\�D��늴��D�����}�ӵ�����������a�����_�P����늄әC�D�ز����^����s���ܵ��S�����ص�Ӱ푡���Ҫ�У�늙C���w���p�O�Y�����ň��ֲ����طǾ��ԣ��Y�������Ǿ��ԡ����˾S���_�P����늄әC���B�m�\�D��횲����ГQ����׃�Q�������_�P�������ṩͬһ�����늴������_�P�·���}�_������a�����M�ň����γɲ��ӵ��D�أ�����׃�·��늄әC�Ĺ���Դ��늙C�Ķ���늉��������⣬߀��һϵ���C�����������C��Ӱ��£�늙CҲ���a�������D�أ�ʹ�D�ٳ��F�����ԵĶɄӡ�
2�����_�P����늄әC�D�ز��ӷ���
2.1ϵ�y���Ի�����
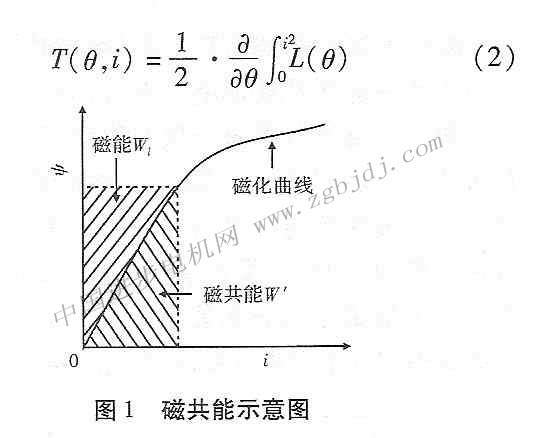
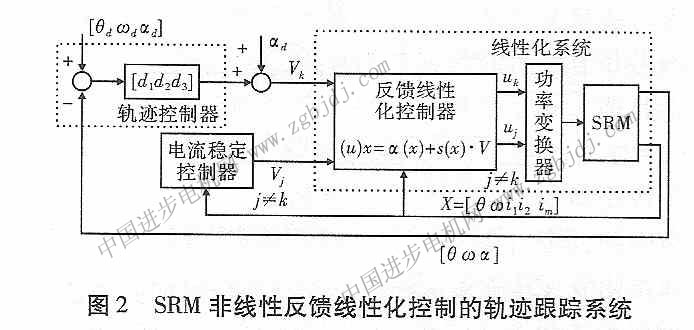
�īI[1]���]��SRM����ϷǾ��Զ�׃��ϵ�y��Marija Ilic-Spong�����״Ό��Ǿ��Կ��Ƶ�
�֎η���������SRD����SRM���F�˷Ǿ��Ԡ�B�������Ի����ƣ��ܺõ��a����SRM�ķǾ�
�����ԣ������˶���������ڴ����D�خa���е�Ӱ푣��ڙC���˵�܉�E��ۙ��SRM����ֱ�ӂ���
����Ԫ��ȡ���˃������ܣ�ϵ�y�Y����D2��ʾ�����ǣ�ϵ�y�Č��F��Ҫ֪��늙C�����Ѕ�������
����Ҫȫ��B���D��λ�á��D�١����ٶȡ�����������ɜy��
�īI[2]���Æ��������D�؞����ε��D�ط��亯����ʹ�Q�����g��ԭ��ͨ���D�ؾ��ԜpС����ͨ���D�ؾ����������÷Ǿ����D�ؿ����a����늄��c늸еķǾ������ԣ��Ķ�ʹԭ�Ǿ���ϵ�y���Ի���������ϵ�y���ܣ��pС���D�ز��ӡ��īI[1-2]�����������ھ��Կ����ɵķ������Ի���������PID���������ṩ���õĄӡ��o�B���ܣ����džμ����ھ��Կ����ɵķ������Ի�������������̎��SRMģ���еIJ��_���ԣ��ڌ��F�rϵ�y���ܺ��y�����C��
��������ϵ�y�������ԣ��īI[3-4]犌�SRM�ٶȸ�ۙ���ã����]��ģ�;��в��_���ԣ�����Lyapunov�� |