����MSP430�Ķ�C����ϵ�y�OӋ
�����i������ǰ��������
���Ϻ���ͨ��W���պ���WԺ���Ϻ�200240��
ժҪ����������F��һ�N��MSP430F149��Ƭ�C��Ӳ�����ĵ�ijС�͟o�˙C��C����ϵ�y������ϵ�y�Ĺ��ܼ�Ӳ���Y�����ã��o���ˌ��r����ܛ���Ĺ���ģ�K���㷨�����̈D��������ָ����ܛ�����F�^���Б�ע����P�I���}�����Y���������OӋ�����w�п������Č��r�Կ���Ҫ�ɿ��Ըߣ����ЏV���đ��Ãrֵ��
�P�I�~���o�˙C����C��MSP430F149,�w�п���
�ЈD���̖��TM275��TM381 �īI��־�a��A ���¾�̖��1001-6848( 2010) 01-0046-04
0�� ��
�o�˙C��һ�N�Ʉ����ӡ��C�ϟo���{���؏�ʹ�õĺ������ĺ��Q���ڟo�˙Cϵ�y�У�����PWM����̖���ƵĶ�C����Ҫ�Ĉ��ЙC�������ǟo�˙C���Ƅ����Ą�����Դ�������ϵ�y�Uչ������[1.2]�����w��ϵ�y���������÷ֲ�ʽ���ԣ�����C�Ŀ��Ʋ�������һ��������Ԫ�M���OӋ���Q���C����ϵ�y��
���y�a��PWM���ķ�����ͨ�^�����ķ���ԭ���팍�F�ģ����a�����}�_�l�ʺ͌����������Ǻܜʴ_�����y��������C�ľ��_���ơ����⣬����CPLD��FPGA�a��PWM�����ںܶ����ϵõ����ã�����CPLD��FPGA���еIJ���̎�������ʹ�����1/0�ӿڣ�����ͬ�r���Ǝ�ʮ�����ϰق���Cͬ�r��������CPLD��FPGA����PWM���r�������߂���̎�����������H������߀��ҪMCU��Ϲ�������֮�ɱ��ߣ��_�l�O�䰺�F���O������������đ��÷�����
���چ�Ƭ�C�������ܷ����������`����ȸߡ��r����������c�������a��PWM���ڌ��H�еõ��ˏV�����á����Ľo����һ�N�·f����MSP430��Ƭ�C�����Ԏ��Ķ��r���a��PWM1j~[3.4]�ķ������ɱ��ͣ����ܷ��������ɹ������ڌ��`��
1���w��B
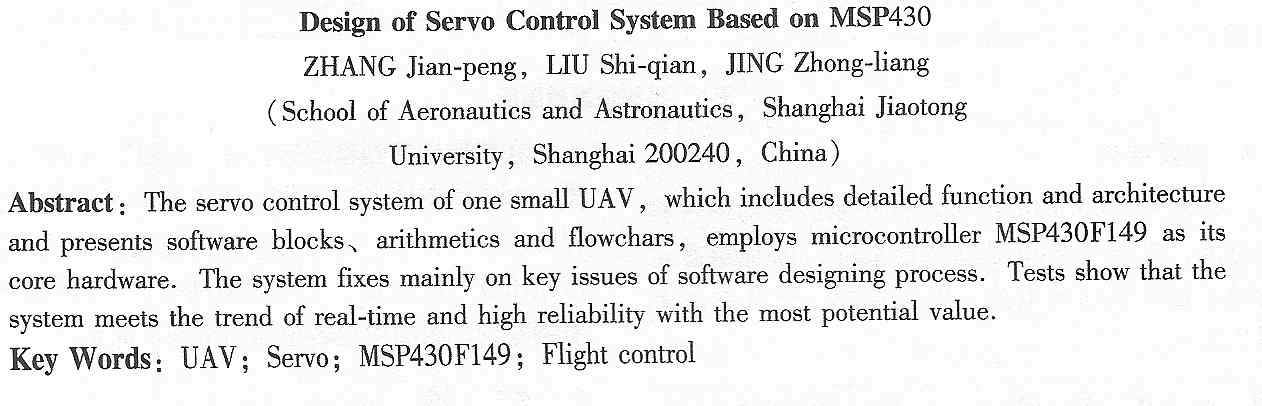
�w�п���ϵ�y���w�����D1��ʾ�������w��ϵ�y�����w��Ӌ��C����C����ϵ�y��������ϵ�y��GPS���C�d�Դ������վϵ�y�M�ɡ����w���^���У��o�˙Cһ����ͨ�^������ϵ�y��GPS�@���w���ˑB�ͺ���Č��r��������ͨ�^�o��늂��ص��棻��һ�����S�r���յ����ς����b��ָ����@Щ��Ϣ����A�����^����Ӌ��C�����ɽ��㣬����һ���f�hݔ������ָ���C����ϵ�y[5,6]���ٽ��ɶ�C����ϵ�yݔ����������̖���ƶ�C��ƫ�D���Ķ����F���o�˙C�w���ˑB�Ŀ��ơ�
2 ��C����ϵ�yӲ���OӋ
2.1ϵ�yӲ���Y��
���ڟo�˙C����ȼ��늳�������Դ������Ҫ��C�d�O��M���ܹ��ĵ͡��w�eС�������p���@�Ӽȿ��Խ��͓p���������ϵ�y�����ԺͿ��ɔ_��������������˼�룬�OӋ�����﹫˾��MSP430F149��Ƭ�C[7��9]����ĵĶ�C����ϵ�y��ԓϵ�y��Ҫ��CPU���Ɔ�Ԫ������ͨ�ņ�Ԫ���}�_��̖̎���Ԫ���Դ��Ӳ���·�M�ɣ�ϵ�y�Y����D2��ʾ��
2.2��C����
1)��C�Ę����c����ԭ��
��C��Ҫ�����⚤��С��ֱ��늄әC���p���X݆��λ�Ùz�y���Ϳ����·�������ɡ��乤��ԭ����D3��ʾ�����У�ֱ��늄әC���������a������Դ[10]���\���ɜp���X݆�p�٣����f�oݔ���S�Ͷ�P����ݔ���S����B�����λӋ�����ԙz�y��ǰλ�ã�������ֵ�c����̖�˿ڰl�́���λ����̖�M�б��^��ͨ�^�����·������ֵ�Ŵ���늙C���в��������Fλ���ŷ�[11]��
2)��C�Ŀ���
��C�ǟo�˙C�w�п��ƵĈ��ЙC����Ҳ�DZ�ϵ�y�Ŀ��ƌ��o�˙Cһ���b����5����C���քe�Á��������T�������������桢�ݾ��β��[12]���˜ʵĶ�C��һ�����ȿ��{�������Է����}�_��̖��PWM�����ƣ��Ա�ϵ�y���õ��ձ�Futaba��˾���a��S3003��C���������}�_���ڞ�20 ms�������}����l 5 ms������0�ȣ��{���������1 ms�����������}�_���ȸ�׃�r����C�D�S�Ƕ������l��- 90�ȵ�90�ȃȵľ��Ը�׃����ͨ�^�B�U���Ӷ����\�ӣ��Ķ����Ɵo�˙C���w���ˑB����Cݔ���}�_�c��ƫ�ǵČ����Pϵ��D4��ʾ��
|