һ�N����SPWM�ğoˢֱ��늄әC���·���
��f���R���䣬����־���T�����������I��W�Ԅӻ��WԺ������710072��
ժҪ�������ӵğoˢֱ��늄әC�D���}���^�����y���Ҳ��ӵğoˢֱ��늄әC�mȻ�D���}��С����ϵ�y�����·���s������Ҫ�߷ֱ��ʵ��D��λ�Â�������ᘌ�����Hallλ�Â����������ҟoˢֱ��늄әC�������һ�N��������Hallλ����̖��ͨ�^ܛ���㷨������·�����}���{�Ʋ��팍�F���Ҳ��ӟoˢֱ��늄әC���·�������ģ�c�����C����ԓ�������������D���}�ӷ������Ч�ԡ�
�P�I�~�����Ҳ��ӣ��oˢֱ��늄әC��Hallλ����̖�������}���{��
�ЈD���̖��TM36 +1��tT271+��4 �īI��־�a��A ���¾�̖��1001-6848��2010��01-0042-04
0�� ��
BLDCM�ķ����������������εĿ����·�����r���D��λ�Â��������õ��ˏV�����á�Ȼ����������BLDCM��늘дň������S�����C���������D�Ӵ���и��C�����������������^����D���}�ӡ����Ҳ���BLDCM�����D�ز���С�������͡��\�пɿ��ȃ��c�������y�����Ҳ���BLDCM��Ҫ�߷ֱ��ʵ��D��λ�Â����������W���a�������D׃�����ȣ���z�y�D��λ�á��@Щ�����������r���F�����Ұ��b�{ԇ���s[1]����ˣ��о��_�l�^�齛����BLDCM���Ҳ��Ӽ��gֵ���Pע���ú������еķ�����ȡ���r�Ƶ�
��W���a��ֵ���Pע[2]��
ᘌ�����Hallλ�Â����������Ҳ�BLDCM�������һ�N��������Hallλ����̖��ȡ���Ҳ������ڡ���ֵ���c����������Ҏ�t�ɘӷ����Wģ�ͣ�����ܛ������c���rӋ����Y�ϵķ�����������SPWM����������һ���ēQ��߉ݔ����·SPWM��̖���M��BLDCM�����Ҳ��ӣ�����Ч�pС�D���}�ӣ����F�ͳɱ�ƽ���\�С�
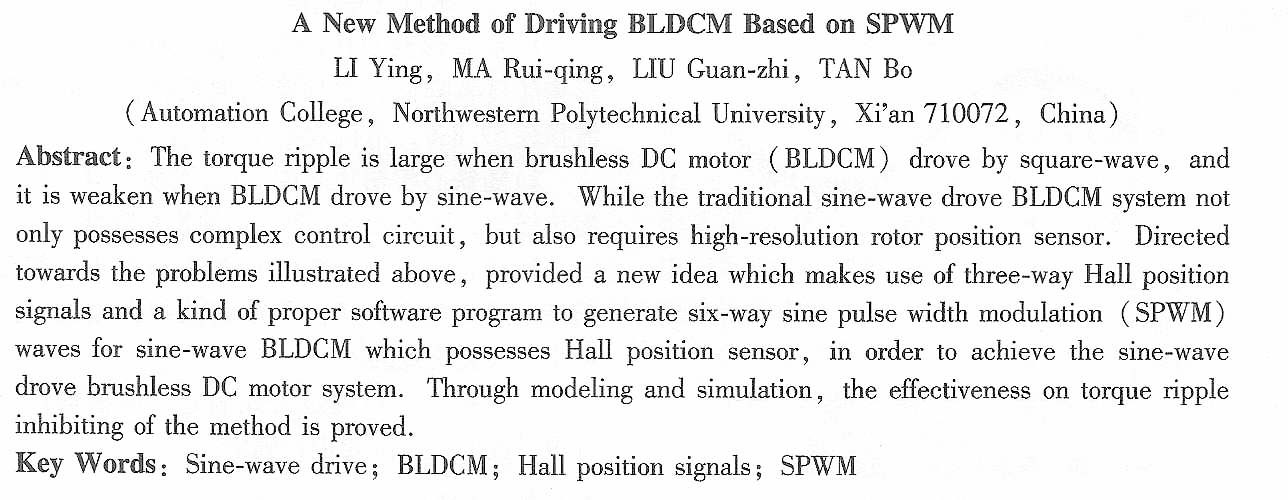
1 ���Ҳ�����ԭ��
���Ҳ��ӷ����Ĺ���ԭ����D1���ⲿ�λӋ���������D�ٽo����ͨ�^��Ƭ�Cݔ�벶�@ͨ����Hallλ����̖���F�D��λ�ýǶȵą^�g�z�y���D��Ӌ�㣬�������ɵ���·SPWM��̖����������ʽ��׃����ֻ���ʹܵ�ͨ�࣬�M������BLD-CM�\�������Ҡ�B��
1.1���Ҳ����ڡ���ֵ����λ��̖��Ӌ��
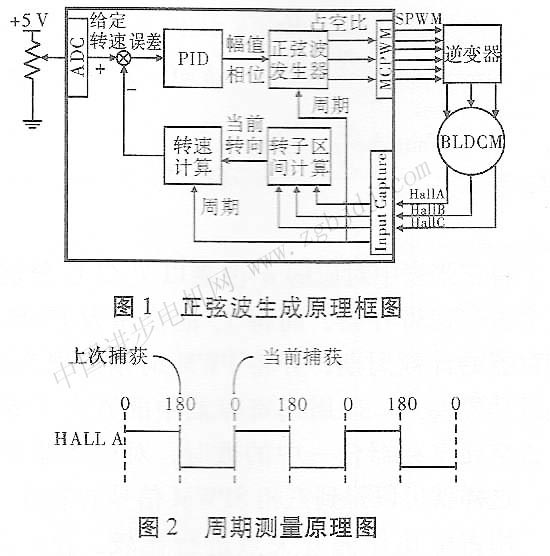
Ҫ���F���Ҳ���BLDCM������Ҫ��ȡ���Ҳ��ăɂ��P�I��̖�����ںͷ�ֵ������BLDCM����늉��cHallλ����̖ͬ���ڣ�������Ҳ�������̖��ͨ�^��Ƭ�C�y��ݔ�벶�@ͨ����A��Hallλ�Â�������̖�����ɂ�������׃�ؕr�̣����M�Д���̎���õ�����D2��ʾ��
���� T= ��t =t2 -t1 (1)ʽ�У�T���Ҳ����ڵİ�ֵ(s)��t1����׃�ؕr��(s)��t2����׃�ؕr��(s)��
���չ�ʽ(1)��������A��Hallλ����̖���������ֵ�M�Ќ��r�y�������˱��CӋ���������������ÿ��T�_ʼ�r��Ҫ�����r�����㡣
���������{�Ʋ���ֵ�ĸ�׃��ʹ�������{�Ʋ��������d���Ľ��cҲ������׃���Ķ�ʹSPWM����ռ�ձȸ�׃���M����׃����׃��ݔ��늉�����������Ҳ��ķ�ֵ׃�����O��늙C������D�صĴ�С�����D�ص�׃�������D�ٵ�׃������ˣ�����ͨ�^�ٶȭh�����Ҳ���ֵ�M���{�ء�
��늙C�\�Еr�����λӋ�o�����D��nref���^A/D�D�Q���õ����з�̖С����ŵ���׃��Reference - speed�С����y���D�ٿ�����ʽӋ��
�@�ã�
ʽ�У�fM�����Ҳ��l��(Hz)��
�ɴ�
ʽ�У�nM�y���D��(r/min)��p늙C�O������
�ýo���D��n ref��****ֵ�p���y���D��n< |