����DSP������ͬ��늙Cȫ����׃�l
�{�ٿ���ϵ�y���OӋ
��܊�h1����ѩ��2
(1�������̴�W���������710048��2�������ռ��g�ߵȌ��ƌWУ���������710077)
ժҪ����B�ˌ����M��늙C���ƌ��Ô�����̖̎����(DSP)оƬ��ʸ�������㷨��Y���M�е�����ͬ��늙C���ƣ��_�l�˼��g���M���ŷ���������ԇ�Y��������ԓ����ϵ�y���^�õĄӑB���ܺͷ��B���ȣ����Ҿ��нY�����Σ��OӋ�����������`������c��
�P�I�~������ͬ��늙C��ʸ�����ƣ����ܹ���ģ�K
�ЈD���̖��TM921 51��TM351 �īI���R�a��A���¾�̖��1673-6540(2010)02-0043-04
0 ����
����ͬ��늄әC(PMSM)���нY�����Ρ��\�пɿ����w�eС�������p���Լ������^�ߵ�Ч�ʺ����ȃ��c���яV�������ڹ��I�C���ˡ����ؙC������������ϵ�y�ȸ��N�Ԅӻ��O���I��Ŀǰ�����ֻ������ŷ��{��ϵ�y���õ��{�ٷ����Ǯ�ǰ��Փ���첢�ҷdz����е�ʸ�������㷨����늉����gʸ���}���{��(SVPWM)��SVPWM���Ʒ����c������}���{��(PWM)���Ʒ�����ȣ�����ֱ��늉������ʸߡ����ƺ��Ρ��p��С�����ڔ��ֻ��������F�ȃ��c���F����ȡ�����y�����}���{��(SPWM)���Ƶ�څ��[1]��
����ʸ�������㷨Ҫ�ں̵ܶ����ڃȲɼ�PMSM�D�ӵ������늉��ȅ��������M��Ӌ�㣬ݔ����������һ���̎�������y�_��Ҫ����˱��Ľ�B��ϵ�y���õ��݃x��(TI)��˾��늙C����оƬTMS320LF2407A��������оƬ���������˾�ĵ��Ĵ����ܹ���ģ�K(IPM)PS21865���OӋPMSM��ȫ����׃�l�{�ٿ���ϵ�y������TMS320LF2407A�ĸ���̎������������늙C���Ƶ�����ӿڣ�ʹ������ȫ����׃�l�{�ٿ���ϵ�y���п��ƾ��ȸߣ����r�ݏ���Ӳ���Y�����Ρ��������c��
1 PMSM���Wģ�ͼ�����ԭ��
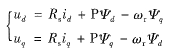
����PMSM��d-q����ϵ�£��䶨��늉����̞飺
ʽ�У�ud��id��������늉��������d�S�ķ�����
uq��iq��������늉��������q�S�ķ�����
Rs������������裻
P���������ӣ�
��r�����D��늽Ƕȣ�
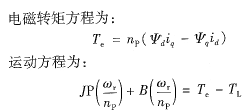
np�����D���@�M�ĘO������
TL����ؓ�d�D�أ��䷽���c늴��D���෴��
��d,��q�����քe�鶨���@�Md��q�S��朡�
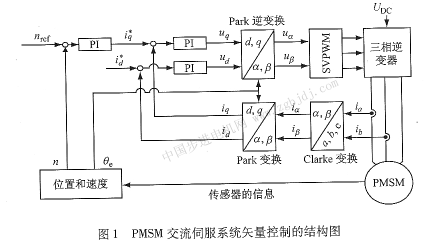
늙C�ӑB���Ե��{���Ϳ�����ȫȡ�Q�ڄӑB���ܷ�����_�ؿ���늙C늴��D��ݔ�����ں����D�������@�MӰ푵ėl���£���늴��D�ط��̿�֪��PMSM��늴��D�ػ�����ȡ�Q�ڽ��S�����ֱ�S����������صĿ�����K�ǚw�Y�錦���S��ֱ�S����Ŀ��ơ�ĿǰPMSM��������Ʋ�����Ҫ�У�id=O���ƣ����������****���ƣ�cos��=l���ơ���ϵ�y����id=O���ƣ�ԓ��������늘з����]��ֱ�Sȥ�ŷ����������a��ȥ��Ч�����������F����늙C�˴Ŷ�����늙C����׃�ĵĬF���ܱ��C늙C��늴��D�غ�늘���������ȣ����F���D�صľ��Ի����ơ�Ҫ���Fid=O�Ľ�����ƣ�ͨ���Ѓ�
2ϵ�y��Ӳ���OӋ
��M��늙C����ϵ�y�İlչ��Ҫ��20���o90���ĩ����˾�Ƴ���TNS320x24xϵ�Д�����̖̎����(DSP)��ԓϵ��DsPоƬ���錍�F�߾��ȡ��N������늉�ǰ��������ƺ����������ۙ���ơ�늉�ǰ�����������һ�N��ȫ���Ի��Ľ�����Ʒ���������ʹid��iq��ȫ���������Ҫ���r�y��i���ͦ�r������np��rLqiq�ij˷e�\�㡣�@�N�����Ĝy�����ȺͿ��ƌ��r�Զ���Ӱ푵��������ܣ���ˣ�Ҫ������ȫ�����Ǻ����y�ġ����������ۙ���Ʋ��ñ����e����ֱ�����Ʒ�ʽ���ŷ�ϵ�yݔ������C������С���o���B�`������Ժá���ϵ�y�x�����e����ֱ�����Ʒ�ʽ��
�Č�PMSM���Wģ�͵ķ�����֪������� |