һ�N���şoˢֱ��늙C�Կ��_һ�i��h(hu��n)�pģ���Ʒ���
���N1,2���� ��1.2����־��1.2
(1���������պ����W�x���ƌW�c��늹��̌WԺ������100191��
2���͑T�ԃx���c����ϵ�y���g�������c�W�ƌ���ң�����100191)
ժҪ��ᘌ������l(w��i)�Ǻ�δ�����gվ�ÿ����������ݵĸ����D�ӿ���ϵ�y�ӑB(t��i)푑����Ć��}�������һ�N�Կ��_һ�iȹ�h(hu��n)�pģ���Ʒ�����ͨ�^����D���p�h(hu��n)�Կ��_���������Կ��_�i��h(hu��n)�������ɷNģʽ֮�g���ГQ�팍�F�o��ֱ��늙C�D���D�ٵĿ�푑����ͳ��{�߾��ȿ��ơ��������D���c��ͨ�^����h(hu��n)�Կ��_�D���i��h(hu��n)ģʽ���F�D���D�ٸ߾��ȿ��ƣ��������D���c��ͨ�^�p�h(hu��n)�Կ��_���������F�������D���c�Ŀ��ٸ�ۙ������͌����C���������������_�Ժ���Ч�ԡ�
�P�I�~���oˢֱ��늙C���Կ��_���������i��h(hu��n)���pģ���ƣ��őҸ�������������
�ЈD���̖��TM301.2��TM36+l �īI��־�a��A ���¾�̖��1001-6848��2010��01-0033-05
0�� ��
�őҸ��������������Ǵ����l(w��i)�ǡ����gվ�ȴ��ͺ������ˑB(t��i)����ϵ�y�L�����������صĈ�(zh��)�ЙC����������ֱ�ӛQ���˺������˿����ܵă�(y��u)�ӡ��������������ݵĸ����D��ϵ�y�Ľ��ٶȷ�ֵ���ȣ�����(w��n)�پ��ȣ���Ӱ���ݔ�����ؾ��ȵ���Ҫ����֮һ�����şoˢֱ��늙C��������������ݸ����D��ϵ�y���әC����������D�ٷ�(w��n)�������nj��F������������ݔ�����ص��x���ȿ��Ƶ��P�I֮һ��
�S������Ҫ��IJ�����ߣ������nj��D�ӷ�(w��n)�پ���Ҫ��ߵĿ���ϵ�y�У��i��h(hu��n)���Ƶõ��ˏV���đ��á��䃞(y��u)�c�Ƿ�(w��n)�پ��ȸߣ����_10.4����������ӑB(t��i)푑��������ɔ_������īI[1-3]������Փ�ό��F��������Փ�е����m�����ơ���ģ׃�Y�����ƺ��i��h(hu��n)������Y�ϑ��õ�늙C�Ŀ�����ȡ���˺ܺõĽY������ȱ�ٌ����C���īI[4]ͨ�^������i��h(hu��n)���Ʒ�ʽʹ늙Cϵ�y�_�����^�ߵķ�(w��n)�ٿ��ƾ��ȣ�����ӑB(t��i)푑����}�]�е��Խ�Q���pģ�����ܺܺõĽ�Q�i��h(hu��n)�ӑB(t��i)���Ć��}[1]���������p�h(hu��n)PI �i��h(hu��n)�pģ���ƞ���������Ч���д���ߡ�
�Կ��_����������هϵ�yģ�ͣ����г��{�͡�푑��ٶȿ졢�㷨���ε����c[6-7]��������õ��V�����á��īI[8]���Կ��_�������\�õ�����ͬ��늙C�У��õ���һ�N���εķǾ���Ħ�����a���������īI[9]�ɹ��،��Կ��_�������\�õ��oˢֱ��늙C�Ŀ����в�ȡ����һ��Ч����������ƾ���߀���������g��ᘌ����φ��}����������oˢֱ��늙C�Կ��_һ�i��h(hu��n)�pģ���ƣ����Կ��_����푑��졢���{�͵����c���i��h(hu��n)�߾��ȵă�(y��u)�c��Y�ϣ����F�oˢֱ��늙C�߾��ȿ�푑����ơ�
1�oˢֱ��늙C�Կ��_һ�i��h(hu��n)�pģ����ϵ�y
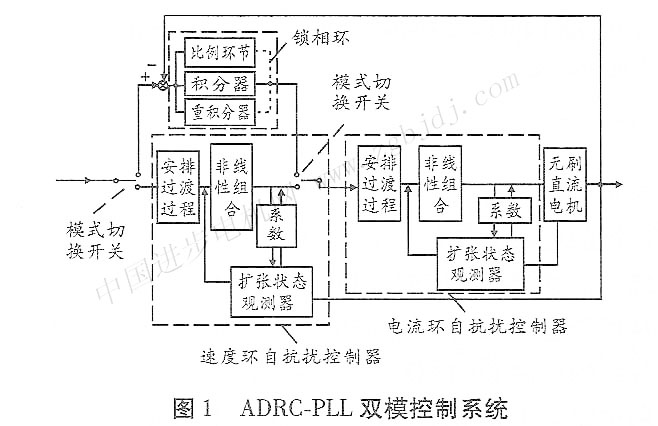
�Կ��_һ�i��h(hu��n)�pģ����( ADRC - PLL)����������D���p�h(hu��n)�Կ��_������������h(hu��n)�Կ��_�D���i��h(hu��n)�p�h(hu��n)��������ģʽ�ГQ�_�P�M�ɡ���ԭ��������ͨ�^�p�h(hu��n)�Կ��_��������ģʽI�����D���D�����������D���c�������Կ��_���Ɵo���{����푑������c�������D���c����ģʽ�ГQ�_�P�Дಢ�ГQ���i��h(hu��n)����ģʽ��ģʽ���Ԍ��F�i�࣬�Ķ����F�D���D�ٵĿ��١��߷�(w��n)���ȿ��ơ������_��ʹ����ʧ�i�r��ģʽ�ГQ�_�PѸ�ٌ����Ʒ�ʽ�ГQ��ģʽI�����p���Կ��_������ʹ�D�ٷ�(w��n)�������i�����ȣ����е�ģʽ��ʹϵ�y��н���i�_���D�ٸ߾��ȿ��ơ�ADRC-PLL�pģ���ƿ�D,��D1��ʾ��
1.1���şoˢֱ��늙C���Wģ��
�����Զ�����ͨ������������B(t��i)�oˢֱ��늙C�����������䔵�Wģ�ͼ�늴��D�ص����ԡ����˱��ڷ������ٶ������@�M��ȫ���Q����϶�ň��鷽��������������D�Ӵň��ֲ��Ԍ��Q�������X�ۡ��Q���^�̺�늘з����ȵ�Ӱ푣�늘��@�M�ڶ��Ӄȱ�������B�m(x��)�ֲ�����·��ͣ���Ӌ�u���ʹŜ��p�ġ�
�����@�M�������B�ӣ��қ]���о����t늉����̿ɱ�ʾ�飺
|