����ģ��߉���Ƶ�����ͬ��늄әCSVM-DTCϵ�y����
���l�����ֺ��������������i
(�������I��W���������710072)
ժҪ��ᘌ����y������ͬ��늄әCsVM��DTcϵ�y_�в��õ�PI�{������늙C����׃������Ӹɔ_�r������Ȇ��}���ڷ�������ͬ��늄әC���Wģ�͵Ļ��A�ϣ������һ�N����ģ�����Ƶ�����ͬ��늄әCsvM-DTcϵ�y�������OӋ��һ�N�����x�e��헵����m��ģ��������������Q�˂��y��svM DTcϵ�y�е��D��PI���������D��PI�������ʹ��H����������MATLAB����ܛ��������ϵ�yģ�͡�����Y������ԓϵ�y�OӋ���_�����OӋ��ģ�����������ڳ�Ҏ������������Ч�pСϵ�y��机��D���}�ӣ�ϵ�y�������@���ơ�
�P�I�~������ͬ��늄әC��ģ��߉���ƣ�ֱ���D�ؿ��ƣ����gʸ���{��
O�� ��
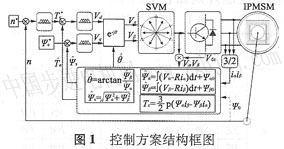
ֱ���D�ؿ���(���º��QDTc)���g�����ɵ��W��M.Depenbrok���ձ��W��I��Takahashi�����ԓ�߿������·f�Ŀ���˼��̓����Ŀ��������A���ˇ����ⱊ���W�ߺ͌��ҵ��Pע���������DTc�đ��Ì���Ҳ������Į�������늙C��u���쵽����늙C�С��ڱ��ͬ���늙C�У�����ͬ��늄әC(���º��QPMsM)���ڽY�����Ρ��\�пɿ���Ч�ʸߵȃ���Խ��Խ�ܵ��˂����Pע���ѽ��ЌW�ߌ�DTc������PMsM֮�С����w���Ʋ�����D1��ʾ��
�mȻDTc�����кܶ����c�������y��ֱ���D�ؿ��Ƽ��g����������ͬ��늄әC�У���Ȼ��һЩ���}��Ҫ��Q������机��D���}�ӆ��}���о���һ�����c���D1�У�����ϵ�y�в��õ�bang-bang�����ݲ��С��ϵ�y����Ӱ푺̶ܴ��ݲ�ʹ��ϵ�y��机��D�ؿ���̎���������½��Ġ�B���@ֱ�ӌ��´�机��D�ص��}�ӣ�늙C���\���^���У��S���ضȺ��l�ʵ����ߣ�늙C�������Ҳ�S֮��׃���@ʹ��늙C�D�غʹ�朹��y���ʣ�Ҳ������늙C�D�غʹ���}�ӡ�������ܶ��W�߶���������˺ܶ�Ĺ�������늙C�����о��I�����@Ҳ�ɞ����о����c֮һ��
�ڱ�����M���g�У����gʸ���{��(sVM)���g�đ��óɞ����^�õĸ��M����֮һ��sVM���gʹ�������ăɂ�����늉�ʸ������늉�ʸ���ϳɳ�����ą���늉�ʸ����������늉�ʸ������ͨ�^�ɂ�PI���������{�����Ӵ�朷�ֵ���D�ث@�á���������PI�{�������OӋҪ��ه���о����_�Ĕ��W����늙C����׃����������ɔ_�r�����������������ھ��{����������ϵ�y�Ŀ������ܡ�
��ˣ��������һ�N����ģ����������sVM-DTc�������OӋ��һ�N�����x�e��헵����m��ģ������������ԓ�������քe���ԭ��ϵ�y�е��ٶ�PI���������D��PI�������ʹ��PI�����������Mһ������ϵ�y�Ŀ������ܡ�����Y������ԓģ���������pС��ԭϵ�y�D���}�Ӻʹ���}�ӣ����F�ٶȵľ��_���ƣ��^ԭϵ�y�е�PI���������ܸ����������Ը�����
1 PMSM���Wģ��
�ԃ�����ͨ������������B����������PMSM�Ĕ��Wģ�ͼ��D�����͡����˷���������������¼��O��
(1)�����@�M��ȫ���Q����϶�ň������ҷֲ�������������D�Ӵň��ֲ����Q��
(2)���ԴŲۡ��Q���^�̺�늘з����ȵ�Ӱ푣�
(3)늘��@�M�ڶ��Ӄȱ�������B�m�ֲ���
(4)��·��ͣ���Ӌ�u���ʹŜ��p�ģ�
(5)�Ӷ��O�ܺ��m�����O�ܞ�����Ԫ����
�t���Եõ�PMSM���D��ͬ�����D����ϵdq�Sϵ�µĔ��Wģ�ͣ�
ʽ�У���d����q��id��iq��Vd��Vq�քe�鶨�Ӵ�朡���������Ͷ���늉���d��q�S������Ld��Lq�鶨���@�Md��q���S��Ч늸У���f���D�Ӵ�朣�Rs�鶨���@�M��裻p��늙C�O��������r���D�әCе���ٶȣ���=np��r,�؞��D��늽��ٶȣ�Te��늴��D�أ�TL��ؓ�d�D�أ�B������ϵ��������늙C�D�ӑT����
2ģ��SVM��DTCϵ�y
����ģ��������������ͬ��늄әCsVM-DTcϵ�yԭ����D��Dl��ʾ��ϵ�y�����p�]�h���Ʒ�ʽ�������D���c���H�D�ٵ��`�ģ��������ݔ�������D�أ������D�ء�������朷քe�c���y�D�ء����y��朵��`��ɂ�ģ�����������Ʌ���늉�Vd��Vq,���^����׃�Q���ƿ��gʸ���}���{��(���º��QsvM)��������늉�Դ��׃�����}�_���M��������ͬ��늄әC��
|