����׃�ٷe��pid���_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)�{(di��o)��ϵ�y(t��ng)
��짣����겨��������
(���K�Ƽ���W(xu��)�����K�(zh��n)��212003)
ժҪ���ڷ������_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)�]�h(hu��n)�ٶȿ��Ʒ����Ļ��A(ch��)�ϣ�ᘌ�(du��)pid�㷨���_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)��(y��ng)���г��F(xi��n)�Ć�(w��n)�}���o��������(y��ng)�Ľ�Q����������˷Ǿ�(xi��n)��׃�ٷe��pii)�㷨�����ɹ��ؽ�Q���ڵͲɘ����ڕr(sh��)pid�㷨�ķe��͆�(w��n)�}��
�P(gu��n)�I�~���_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)��pid���ƣ��Ǿ�(xi��n)��׃�ٷe��
0�� ��
������ɱ����߿ɿ��Ժ������D(zhu��n)�QЧ���ǙC(j��)��\(y��n)��(d��ng)����ϵ�y(t��ng)�İl(f��)չڅ��(sh��)���_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)�Y(ji��)��(g��u)��(ji��n)�Σ��m���ڐ��ӭh(hu��n)�����\(y��n)�У�ֻ�ڶ��������@�M���](m��i)���D(zhu��n)���~�ġ�����_(k��i)�P(gu��n)�����(q��)��(d��ng)ϵ�y(t��ng)ӭ���˙C(j��)��\(y��n)��(d��ng)����ϵ�y(t��ng)�İl(f��)չڅ��(sh��)���ں��������Ӽ��g(sh��)�ͬF(xi��n)�������㷨�l(f��)չ�ɹ����ɞ����C(j��)��\(y��n)��(d��ng)�����I(l��ng)����о����c(di��n)�������(l��i)�яV����(y��ng)���ڼ�늡���܇(ch��)����(sh��)�ؙC(j��)�����C(j��)���˵��I(l��ng)��
1�_(k��i)�P(gu��n)����늙C(j��)���ٶȿ��Ʒ���
��(du��)�_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)�D(zhu��n)�ٵĿ���һ������]�h(hu��n)���ơ��c�_(k��i)�h(hu��n)������ȣ��ٶȿ����]�h(hu��n)ϵ�y(t��ng)�ęC(j��)е����������(y��u)Խ�ԣ��]�h(hu��n)ϵ�y(t��ng)�ęC(j��)е�����c�_(k��i)�h(hu��n)ϵ�y(t��ng)�C(j��)е������ȣ������ܴ����ߣ�������d�D(zhu��n)����ͬ�r(sh��)���]�h(hu��n)ϵ�y(t��ng)���o����(�~��ؓ(f��)�d�r(sh��)늙C(j��)�D(zhu��n)�ٽ����c������d�D(zhu��n)��֮��)ҪС�öࣻ��(d��ng)Ҫ����o������ͬ�r(sh��)���]�h(hu��n)�{(di��o)��ϵ�y(t��ng)���{(di��o)�ٷ������Դ����ߡ��_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)���ٶȿ��Ʒ�����D1��ʾ��
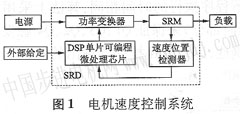 �_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)��������늙C(j��)�{(di��o)���\(y��n)�е��ИУ����C��̎�����Nλ�á��ٶȵȽo����̖(h��o)���o������(y��ng)����ͨ�ࡢϵ�y(t��ng)���o(h��)���@ʾ����̖(h��o)���Ҹ���(j��)�I�P(p��n)ݔ���ָ��������(d��ng)��ֹͣ���ٶ��O(sh��)�õȺ͂������ṩ�ĸ��N��̖(h��o)(��λ�á������)ݔ����ͨ����̖(h��o)���(q��)��(d��ng)���_(k��i)�P(gu��n)�ܵ��_(k��i)ͨ�c�P(gu��n)�࣬�(q��)ʹ늄�(d��ng)�C(j��)�D(zhu��n)���D(zhu��n)��(d��ng)��tms320f240оƬ��ti��˾��(zhu��n)�T(m��n)ᘌ�(du��)늙C(j��)����׃�����C(j��)���˵ȿ��ƶ��O(sh��)Ӌ(j��)�ģ������������Ƶ�����O(sh��)�䣬�ҿ��O(sh��)������(g��)��(y��u)�ȼ�(j��)���Дࡣ�˿�оƬ��늙C(j��)�{(di��o)���I(l��ng)������w��(l��i)�f(shu��)���o(w��)Փ�Ǐ�Ӌ(j��)���ٶȡ����ȡ���(n��i)�ⲿ�YԴ߀����?x��n)r(ji��)���ϣ�����(y��u)�ڂ��y(t��ng)��һϵ�І�Ƭ�C(j��)�����Ա��O(sh��)Ӌ(j��)���x��tms320f40��(l��i)�����������cpu��
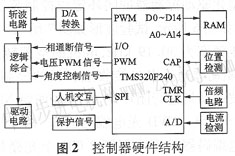
��D2��ʾ������(g��)��������Ԫ��Ҫ������Сϵ�y(t��ng)�·��λ�Ùz�y(c��)�·������z�y(c��)�·�����l�·���^(gu��)�����^(gu��)����Ƿ�����o(h��)�·���D(zhu��n)�Q�·������ز��·�Լ��˙C(j��)�����·�ȡ�
 �]�h(hu��n)�ٶ��{(di��o)��(ji��)�����ñ����e���ֿ���(��(ji��n)�Q(ch��ng)pid����)���ǰ�ƫ��ı������e�ֺ����M(j��n)�п��Ƶ��{(di��o)��(ji��)����pid�{(di��o)��(ji��)�����ƽY(ji��)��(g��u)��(ji��n)�Σ���һ����Ҫϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�ͣ�����(sh��)�������������L(zh��ng)�ڑ�(y��ng)�����ѷe�����S���Ľ�(j��ng)�(y��n)��������ֲ��Ӌ(j��)��C(j��)����ϵ�y(t��ng)��ͨ�^(gu��)ܛ�����Ԍ�(sh��)�F(xi��n)����(du��)�ڴ����(sh��)���ƌ�(du��)���ܫ@�ÝM(m��n)��Ŀ���Ч����pid�{(di��o)��(ji��)���mȻ����ʹ�ã������O(sh��)Ӌ(j��)���{(di��o)ԇ�_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)���������^(gu��)���г�����(hu��)����pid�{(di��o)��(ji��)�����ܸɔ_���ɘӾ��ȵ�Ӱ푵Ȇ�(w��n)�}�����ܔ�(sh��)����������Ӱ��a(ch��n)�������e��Ͷ�ʧȥ�{(di��o)��(ji��)���á����ԣ��ڲ�Ӱ푿��ƾ��ȵ�ǰ����(du��)pid�����㷨���Ը��M(j��n)���P(gu��n)ϵ������(g��)�_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)�������O(sh��)Ӌ(j��)�ijɔ���
2�O(sh��)���ٶȺͫ@ȡ늙C(j��)�D(zhu��n)��
�_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)�D(zhu��n)��ϵ�y(t��ng)���ù��ʽλ�Â������������oֹ���D(zhu��n)��(d��ng)�ɲ��ֽM�ɣ�ǰ�߰����t��l(f��)����O�ܡ��t��������O�ܺ��o���·�����ߞ�srm�D(zhu��n)��ͬ�S���b��6�X�ڹ�P(p��n)��ÿ�X�g��30o���ڹ�P(p��n)�c늙C(j��)ͬ�����D(zhu��n)��ͨ�^(gu��)�ڹ�P(p��n)���ڹ⡢�⣬ʹ����Ԫ���a(ch��n)����(d��o)ͨ�c�P(gu��n)����̖(h��o)����(du��)������8��6�O�_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)���ڶ����ϰ��b�ɂ�(g��)���75o�Ĺ������Ԫ����(j��ng)ݔ���·̎����ݔ����·��λ��15o��ռ�ձȞ�50���ķ�����̖(h��o)�����M�ϳ��ķN��ͬ�Ġ�B(t��i)���քe����늄�(d��ng)�C(j��)�����@�M��ͬ�ą���λ�á�tms320f240�ăɂ�(g��)���@��Ԫcapl��cap2�քe�z�y(c��)�@��·��̖(h��o)����(d��ng)���@ݔ�����_�ϙz�y(c��)��һ��(g��)�D(zhu��n)�Q�r(sh��)�����r(sh��)��tl��t2��ֵ�����@���惦(ch��)������(y��ng)�ăɼ�(j��)���f(w��n)ifo�ї��С�λ����̖(h��o)���ϡ�����׃�����@���Д࣬��ÿ15o�a(ch��n)��һ�β��@���Д࣬cap���Д����(w��)�������(j��)�D(zhu��n)�ӵ�˲�r(sh��)λ����̖(h��o)����srm늙C(j��)�Q��߉���_��늙C(j��)��(du��)��(y��ng)�@�M�P(gu��n)���c��(d��o)ͨ��������(j��)�y(c��)�ܷ�Ӌ(j��)��늙C(j��)�Č�(sh��)�H�D(zhu��n)�١�
��·λ����̖(h��o)ݔ�벶�@�ڣ�ÿһ����׃�����ػ��½��ض�Ҫ�a(ch��n)��һ�β��@�Д࣬�xȡ����(y��ng)���@�ї��Ĵ�������Ӌ(j��)�����·��̖(h��o)�����ɂ�(g��)��׃֮�g�Ę�(bi��o)��(zh��n)�}�_��(g��)��(sh��)n�����@�����Զ��r(sh��)��2��r(sh��)�g����(zh��n)�����r(sh��)��2Ӌ(j��)��(sh��)�l�ʞ�l. 25 mhz������(j��)t�y(c��)�ٷ����ɵ������D(zhu��n)��Ӌ(j��)�㹫ʽ��
| 


