늙C�\�ӿ��ƾW(w��ng)�j(lu��)����l(f��)չ�о�
�Z�Ծ꣬������
(�������I(y��)��W���������710072)
ժҪ��Փ����늙C�W(w��ng)�j(lu��)���\�ӿ��Ƽ��g(sh��)�����x�Ͱl(f��)չ�F(xi��n)���Ҫ�������^��sscNET��sERcOs��cc-Link��6�N��Ҋ�\�ӿ��ƿ����f(xi��)�h���������c���������c��ָ��늙C�\�ӿ��ƾW(w��ng)�j(lu��)�ĽY(ji��)��(g��u)��Ŀǰ���ڵ���Ҫ���}���ڴ˻��A(ch��)���Mһ���w�{��늙C�W(w��ng)�j(lu��)���\�ӿ���ϵ�y(t��ng)���P(gu��n)�I���g(sh��)�������W(w��ng)�j(lu��)���x��ͨ�Ņf(xi��)�h���\�ӿ��������O(sh��)Ӌ�����ָ���F(xi��n)�������c��̫�W(w��ng)�ļ��ɼ��g(sh��)���o���W(w��ng)�j(lu��)�đ��ã���늙C�\�ӿ��ƾW(w��ng)�j(lu��)�ṩ���µİl(f��)չ����ģ�����ơ�׃�Y(ji��)��(g��u)���Ƶ����M���Ʋ��Ե��Mһ�����ã���늙C�\�ӿ��ƾW(w��ng)�j(lu��)�ṩ�ˏ���ļ��g(sh��)֧�֡�
�P(gu��n)�I�~���W(w��ng)�j(lu��)���\�ӿ���ϵ�y(t��ng)i�F(xi��n)����������ϵ�y(t��ng)��ͨ�Ņf(xi��)�h
0 �� ��
�S�����ƿƌW��Ӌ��C�W(w��ng)�j(lu��)��ͨ�ż��Ԅӻ��x���ȌW�Ƶİl(f��)չ�ͽ���B���\�ӿ���ϵ�y(t��ng)��(j��ng)�v�ˏ�ֱ�������������_�h(hu��n)���]�h(hu��n)����ģ�M����(sh��)�֣�ֱ������Pc���ŷ����ƾW(w��ng)�j(lu��)�ͻ�_]���W(w��ng)�j(lu��)���\�ӿ��Ƶİl(f��)չ�^�̡���늙C�\�ӿ��ƾW(w��ng)�j(lu��)�У��F(xi��n)�������������@�ă�(y��u)�ݲ����ԏV�����ã������F(xi��n)��****�ӬF(xi��n)�������O(sh��)��ͬF(xi��n)�����܃x���O(sh��)��Ļ�(li��n)������ʹ����ϵ�y(t��ng)��(sh��)��(j��)�܉�����̫�W(w��ng)��(g��u)�ɵ��ό���Ϣ�W(w��ng)�j(lu��)�ͬF(xi��n)������֮�g�ɿ���ݔ�����F(xi��n)�ĬF(xi��n)�����ƌӵ�����ӵ�ȫ����Ϣ���ɣ��F(xi��n)����������u�D(zhu��n)�I(y��)��̫�W(w��ng)������Ethemet��TcP��IP���g(sh��)�ĬF(xi��n)�����������ѳɞ�W(w��ng)�j(lu��)���\�ӿ���ϵ�y(t��ng)���о����c֮һ��
1 �\�ӿ��ƾW(w��ng)�j(lu��)���о��F(xi��n)��
����늙C�\�ӿ��ƾW(w��ng)�j(lu��)�ĺ��ģ��F(xi��n)�������������@��(y��u)�ݡ���20���o80����a(ch��n)������(j��ng)�v���Ј��ĸ�������̭���ϲ��c�ؽM��Ŀǰ��N�F(xi��n)����������������������ÿһ�N���������似�g(sh��)���c���m�÷����������f(xi��)�h�Ǹ�������g(sh��)�ĺ��ġ��������\�ӿ���ϵ�y(t��ng)�Ĵ���ͨ�Ņf(xi��)�h����SSCNET��SERCOS��CC-Llnk��DeviceNet��ProFinet��synqNet�ȡ�
1��1 DeviceNet
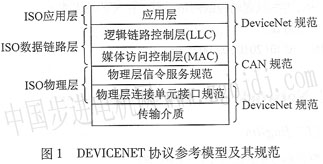
DeviceNet������A1len Bredly��˾��1994��������ǻ���cAN(contml area network)���g(sh��)�ĬF(xi��n)����������ͨ���B�ӽ�����cAN���A(ch��)֮�ϣ�DeviceNeL���x�ˑ��Ì�Ҏ(gu��)��������ӵ��B�ӆ�Ԫ�ӿ�Ҏ(gu��)������ݔ���|(zh��)�����B��Ҏ(gu��)�������ڔ�(sh��)��(j��)�·�ӵ�ý�w�L������(MAc)�Ӻ�����ӵ��������Ҏ(gu��)��������cAN�������g(sh��)����ͨ�Ņ���ģ����D1��ʾ�������c���c������������ͨ�ţ��Ɏ�늸��Q�W(w��ng)�j(lu��)��(ji��)�c���ھ��ľW(w��ng)�j(lu��)���ã�����ʹ��cANҎ(gu��)�sоƬ��֧���xͨ��݆ԃ��ѭ�h(hu��n)����B(t��i)׃���͑����|�l(f��)�Ĕ�(sh��)��(j��)���ͣ���MAc���ßo�pλ�ٲÙC�ƌ��F(xi��n)����(y��u)�ȼ��l(f��)����Ϣ������ͨ���e�`�ּ��z�y�C�ơ�ͨ�Ź��ϵ��Ԅ��Єe���Ԅӻ֏��ܣ����ڵͳɱ����߿ɿ��ԵĔ�(sh��)��(j��)�W(w��ng)�j(lu��)��
1_2 SSCNETf Serlvo System Control NetwoiIk)
SSCNET�����˾��20���o80��������_�l(f��)��������늙C���ƣ���һ�N����ͬ��ͨ�žW(w��ng)�j(lu��)����ݔ���x�h���Ӿ����������õ��ԃr�ȡ���ݔý�����RS485���g(sh��)����ݔ���x���L���_30 m����ݔ���ʞ�5��625 Mbps��ͨ�����ڞ�O. 8 ms�����Ʒ�ʽ������ʽ�ܘ�(g��u)��һ�K����Ic�ɿ���6��Slave���ŷ��(q��)�������°汾��SSCNET-���ݔý��Ğ���w����ݔ���x���L���_800 m����ݔ���ʞ�50 Mbps��ͨ�����ڞ�O��8 ms�����F(xi��n)���^�߾��ȵ�λ�ÿ��ơ��c�������Ʒ�ʽ��ȣ�ͨ�^SScNET�����@�ô������P(gu��n)�ŷ�ϵ�y(t��ng)����Ϣ���������(sh��)����������(sh��)���ŷ����慢��(sh��)�����e�`���a�ȣ��܌��F(xi��n)�����\���S֮�g��ͬ����
1��3 CC-Linkf Control Communieafion Link)
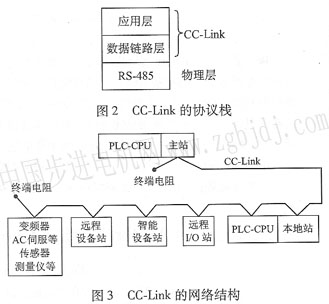
cc-Link������늙C��ʽ�����_�l(f��)��ʹ�Ì�����|�B�ӷ�ɢ��I��o��Ԫ������܆�Ԫ��ͨ�^�ɾ���߉������(PLc)���@Щ��Ԫ�M�п��ƣ��ܜp���侀�����ق�ݔ��(sh��)��(j��)��cc-Link�ă�(y��u)�c���£�(1)���÷��㣬ͨ�ų�ʼ��ֻ����ͨ����վ�M�Ѕ���(sh��)�O(sh��)�ã��������������վ�ij�ʼ�������S��(ji��)�cվ̖����������У�����վͨ��ģ�K�������F(xi��n)�������W(w��ng)�j(lu��)�M�й����͔�(sh��)��(j��)ˢ�£�(2)�̓rλ�c�����ܵĽy(t��ng)һ�����ÏV��݆ԃ��ͨ�ŷ�ʽ��****��(sh��)��(j��)���_918�ֹ�(ji��)��һ�������Д�(sh��)��(j��)�ʞ�98�����߂��Ч��(sh��)��(j��)��ݔ���ԣ�����ͨ�^����ָ��֧��˲�rͨ�ŷ�ʽ�ԝM��Ҫ��r�g��푑������ٵĈ��ϣ�(3)���Ѓ�(y��u)���Ŀ����Ժ����õļ����ԡ���f(xi��)�h�����W(w��ng)�j(lu��)�Y(ji��)��(g��u)��D2��3��ʾ��
1��4 SERCoS (Serial Real-time CommunicationSystem)
sERcOs�ɵ����Ȱl(f��)����1995����ʽ�ɞ�IEc6149l���H�˜ʡ���Ҫ���ڷ�ɢʽ���S�\�� |