���ͳ�С�͟o���w������C����ϵ�y�OӋ
�T���������_������ͬ�S
(�Ϻ���W���Ϻ�200072)
ժҪ���o����һ�N����C8051F��Ƭ�C��MAX II CPID�OӋ�ij�С�͟o���w������C����ϵ�y�����F�˶�·�}���{��(PWM)������̖�IJɘӺ�ݔ����ͨ�^�ɘ�һ·PWM��̖���F�Կ��c�b�ص��ГQ�������ô��п��c��λ�CͨӍ��ϵ�y���гɱ���������ȫ�ɿ������F�������c���w�п���ϵ�y��һ�������w�������ԇ�w���C���ǰ�ȫ���õġ�
�P�I�~����C���ƣ�C8051F��Ƭ�C��CPLD
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004-7018(2008)07-0053-03
O�� ��
��C����ϵ�y���w�п���Ӌ��C�Ͷ�C֮�g�Ľӿڣ����ɼ����ՙC��·PWM��̖���c��λ�C�M��ͨӍ���a�����ƶ�C�Ķ�·PwM��̖�������F�b�غ��Կ��g�Ŀ���ģʽ�ГQ����[1]���īI[2��3]�нo���˸��Ե����Æ�Ƭ�C�팍�F�������ܵķ��������˸��Mʹ�������^��̏��s���Ƭ�Cؓ�ɴ��ȱ�c���īI[4��5]����r����_�P�����چ�Ƭ�C���ɔ_�������^����w�C늴ŭh���ֱ��^���ӣ������چ�Ƭ�CʧЧ����r�����܉F�b�غ��Կ�֮�g���ГQ���īI[1]�����˞V���������������࣬�Mһ�����C�w�����İ�ȫ�����������ڶ�C������ʧ�ض��l�����C��Σ�U��
���Ľo����һ�N����C8051F��Ƭ�C��MAX II CPLD�OӋ�ij�С�͟o���w������C����ϵ�y�����гɱ���������ȫ�ɿ������F�������c�����ھ����̲��ɹ������ڌ��`��
1 ����ϵ�yӲ���OӋ
1.1��C
��C��һ�������]�h����ϵ�y����Ҫ���������·С��ֱ��늄әC���X݆�M�������λ�����p���X݆�M��늄әC�ӣ���K��(ݔ����)����һ�����Եı����λ����λ�Ùz�y��ԓ�λ�����D�������D�Q��һ����늉������o���ƾ�·�壬���ƾ�·�匢���cݔ��Ŀ����}�_��̖���^���a���m���}�_������늄әC��������D�ӣ�ʹ�X݆�M��ݔ��λ���c����ֵ�������m���}�_څ�ڞ��㣬�Ķ��_�����_��λ��Ŀ��[6,7]����C�Ŀ�����̖��������50 Hz��PWM��̖�������}�_���ȏ�O.5��2.O ms����������P��λ�Þ�O��180�㣬�ʾ���׃����
1.2Ӳ�����w�OӋ
�ڟo���w��������ϵ�y�У���C����ϵ�y�����x�������骚��ģ�K�Ͷ�Cһ���ɆΪ�늉���늣��Ա���Ȳ���̖�ɔ_���o���w�������ՙCһ������傀�b��ͨ�����քe�Á������傀��C��������������ͨ������ݔ���b�ذl��C���_�P�������Á��ГQ���Ʒ�ʽ��
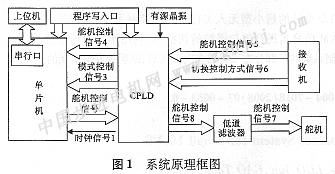
��D1��ʾ�����ՙC���傀�b��ͨ������������ͨ���cCPLD���B���քeݔ���C������̖5���ГQ���Ʒ�ʽ��̖6��CPLD�����õ��Ķ�C������̖5���ГQ���Ʒ�ʽ��̖6��ݔ����C������̖4��ģʽ�ГQ��̖3����Ƭ�C����̖�ɘӶ˿ڡ���Ƭ�Cͨ�^���п��c��λ�CͨӍ������C������̖5���ГQ���Ʒ�ʽ��̖6����Ϣ�l�ͽo��λ�C��ͬ�r����λ�C�õ���C������Ϣ��ݔ����C������̖2��CPLD�У�CPLD����ݔ�����̖2��5��6��ݔ����·��C������̖8�����^��ͨ�V�����õ���·��C������̖7���քeݔ�����傀��C����ͨ�V����������·������һ������һ����ݽM�ɣ��քe������·��C������̖8�M�ОV����CPLD������Դ�����ṩ�r���̖����ݔ���r���̖1�����Ƭ�C�ĕr���̖��
1.3 CPU��CPLD��Ԫ
silicon Lahs��˾��C8051Fϵ�І�Ƭ�C����ȫ���ɵĻ��ϵ�y��оƬ�������c8051���ݵĸ��كȺˣ��w�eС�����ܶ࣬���{ԇ����[8]���ڱ��OӋ�У��ɾ���Ӌ�������(PCA)ģ�K�xȡ���ՙC��̖�}�_���ȣ����r��T2��T3���ڿ��ƶ�C��PWM��̖�����ɵ�Ӳ��ѭ�h����У�(CRC)ģ�K�����M��ͨӍ����У�����伯�ɵ�Ƭ���YԴ��ʹ��ܛӲ���OӋ�����ϵ�y�ɿ��ԘO����ߡ�
Altera��˾�Ƴ���MAx II����ϵ�о��е��ġ������ԡ����r��ϵ�y�ɾ��̵ȃ��c�����OӋ�x����EPM240�������о��̌��F������_�P���ГQ���ƵȆ�Ԫ�������õ�ݔ��˽ӵأ����O�Þ�����B����������ݔ����̖�a����ë |