ģ��PID���ƵĮ���늙Cʸ���{��ϵ�y����
�Z���x�����аף����s�A
(�ӱ�������W���ӱ���ɽ063009)
ժҪ��ᘌ�����늄әC�{��ϵ�y�ķǾ��ԺͽY����������׃�Ե����c����ģ�����ƺ�PID���ƽY���������OӋ��ģ��PID�{��ϵ�y���D��ģ�����Ʒ���ģ�ͣ�����ģ���M���������о�������Y��������ԓ����ģ�;������õ��m���ԡ������ԣ���������˷Ǿ���ϵ�y�Ąӡ��o�B���ԣ�ʹ��ϵ�y�@�����^�õ����ܡ�
�P�I�~��ģ��PID���ƣ�����늙C��ʸ��ϵ�y������
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004-7018(2008)07-0047-03
0 ǰ��
�ڽ�������늙C�ĸ��N�{�ٷ����У����ڮ���
늙C�Ƕ�׃�����Ǿ��ԡ�����ϵı��،��������\���^���д��څ����r׃���ԣ����y�_�����_�Ĕ��Wģ�͡����IJ���ģ�������cPID���ƽY�ϵķ������Ԯ���늙C���D���]�h�{��ϵ�y�������OӋ��������ģ��PID���������������{��ϵ�y��ģ�����Ʒ���ģ�͡�
1����늙Cʸ������ϵ�y
����늙Cͨ�^ʸ��׃�Q�D�����Ч��ֱ��늙Cģ�ͣ���ֱ�����M�п��ƣ�Ȼ��ͨ�^��׃�Q��ֱ����׃�ؽ��������@���Ǯ���늙Cʸ������ԭ����
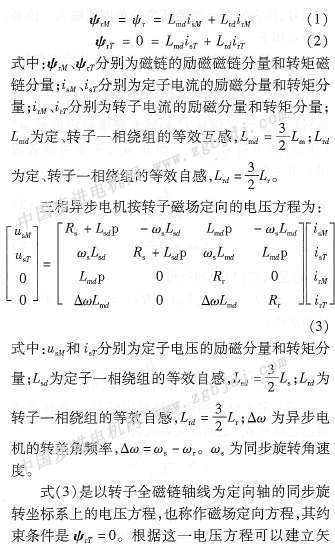
���D�Ӵň�����Į���늙Cʸ������ϵ�yģ�ͣ����ڰ��D�Ӵ�朶������D����ϵ��M�Sȡ�����D��ȫ��朦�r�S����T�S��ֱ��M�S���Ķ���r��T�S�ϵķ������㣬�@�����D��ȫ��朦�r****��M�S�@�M������a������֪�������ʸ��is(Fs)��M�S�ϵķ���isM�Ǽ���������������T�S�ϵķ���isT�Ǽ��D�������������r��M-T�S�ϵķ������÷��̱�ʾ�飺
������ϵ�y�������Ŀ��Ʒ���ʽ��
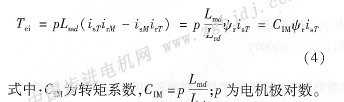
���ஐ��늙C���D�Ӵň�������D�ط��̞飺
ʽ(4)��������ͬ�����D����ϵ�ϣ����������늄әC�D�Ӵ�朶��t����늙C��늴��D��ģ�;��cֱ��늄әC��늴��D��ģ����ȫһ���ˡ�
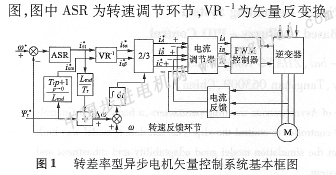
�D1�鮐��늙C���D��ʸ������ϵ�y�ĽY��
�h�����D�ٷ������ٶ���̖�����������Ӌ����D����ٶ���ֵ̖֮�ͽ��^һ���e�֭h��׃���D�ٽǶ���̖������ʸ����׃�Q�h���ĽǶ�ֵݔ�롣ԓϵ�y���c����[1]:
(1)�D���{����ݔ���������D�صĽo����̖��
����H���]�D�Ӵ�ͨ�ķ��B����ʽ����p=0���t��
����ƪ�������IJ��ٽo��ʸ��׃�Q���Pϵʽ���ƌ���ԔҊ�����īI[2]��
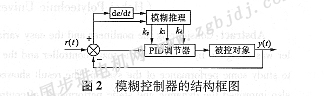
2 ģ��PID�������Ľ���
��Ҫ�����ķ���ģ���У��Ԯ�ǰ�D�ٵ�ƫ��e��ƫ���׃����ec����ݔ�룬���xe��ec��ģ������ģ���Ӽ���|NB��NM��NS��ZO��PS��PM,PB|����������ӳ�䵽Փ��[-3��3]�ϡ�
��D2��ʾ����ģ����������ݔ��kp��ki��kd���鳣ҎPID�������ı������e�֡��օ���������ֵݔ������kp��ki��kd��ģ���Ӽ����x��|NB,NM,NS,ZO��PS,PM,PB|��Ҳ��������Փ��ӳ�䵽[-3��3]�ϡ�ģ�����Ƶĺ�����ģ������Ҏ�t������Ҏ�t���xȡֱ�ӛQ������Ч���ĺÉģ�����kp��ki��kd��ֵ��ݔ��ƫ��e��ƫ���׃����ec���^ģ������Ҏ�tӋ������ģ�����kp��ki��kd��������ԭ�t���£�
(1)|e|�ܴ�r���oՓec��Σ�������ȡ��Ŀ��ƣ�ʹ�`��****ֵ�� |