����TMS320F2812������ͬ��
늄әC(j��)�ŷ�ϵ�y(t��ng)�O(sh��)Ӌ
�����A
(�M�ώ����W(xu��)Ժ�����c�����Ϣ�W(xu��)Ժ�������M��341000)
ժҪ������ͬ��늄әC(j��)(PMsM)��һ����׃�����Ǿ��ԡ���(qi��ng)��ϵď�(f��)�sϵ�y(t��ng)�����ŷ�ϵ�y(t��ng)�Ŀ��Ʋ���ֱ��Ӱ�PMsM������ָ��(bi��o)����TMs320n812������оƬ��Ԕ��(x��)Փ������PMsM���(zh��)��Ԫ���Ľ����ŷ�ϵ�y(t��ng)��ܛ��Ӳ���O(sh��)Ӌ��ԇ�(y��n)������ԓ�ŷ�ϵ�y(t��ng)����(y��ng)�죬���ȸߣ��ܝM�㹤�I(y��)��(y��ng)�õ�����
�P(gu��n)�I�~������ͬ��늄әC(j��)���ŷ�ϵ�y(t��ng)���}���{(di��o)��
0 �� ��
����ͬ��늄әC(j��)(PMsM)���нY(ji��)��(g��u)���Ρ������ܶȸߡ�Ч�ʸߵȃ�(y��u)�c(di��n)���ڸ߾��Ȕ�(sh��)�ؙC(j��)�����C(j��)���ˡ��طN�ӹ��ȹ��V�����õ��ˏV����(y��ng)�á����˝M�㾫�ܔ�(sh��)�ؙC(j��)�����طN�C(j��)���˵�ؓ(f��)�d�(q��)�ӵ�Ҫ����PMsM���(zh��)��Ԫ�����ŷ�ϵ�y(t��ng)�����Խ��Խ�ߵ����ܺͼ��g(sh��)Ҫ���S�����ܹ��ʼ����·�͔�(sh��)����̖̎����(DsP)�ij��F(xi��n)���ŷ����Ƽ��g(sh��)Ҳ���M(j��n)����һ��ȫн�r�ڣ���ʹ�ŷ�ϵ�y(t��ng)ģ�K����ȫ��(sh��)�ֻ����Ը�������(sh��)�F(xi��n)��
������TMs320F2812������оƬ��Ԕ��(x��)Փ������PMsM���(zh��)��Ԫ���Ľ����ŷ�ϵ�y(t��ng)��ܛ��Ӳ���O(sh��)Ӌ��ԓоƬ���\(y��n)��������DsP(c24x)�����һ�������Ҿ����ⲿ���ɶȸ��ߡ�A��D�D(zhu��n)�Q�ٶȸ�������c(di��n)��ԇ�(y��n)������ԓ�ŷ�ϵ�y(t��ng)����(y��ng)�죬���ȸߣ��ɝM�㹤�I(y��)��(y��ng)�õ�����
1 PMsM��(sh��)�W(xu��)ģ��
�ڼ��O(sh��)��·��ͣ���Ӌ�Ŝ��͜u���p��Ӱ푣����g�ň������ҷֲ��ėl���£��������bʽPMsM����늙C(j��)�D(zhu��n)��ͬ�����D(zhu��n)��dq����(bi��o)ϵ�У����ôň�������ƣ���id=O�r��늙C(j��)�Ĕ�(sh��)�W(xu��)ģ�͞飺
PMsM늉�����
PMsM�D(zhu��n)�ط���
PMSM�\(y��n)�ӷ���
ʽ�У��_��(bi��o)��dq�����քe����dq�S��늉������������Rs��Pn��J��e0��R����p�քe�鶨���@�M��衢�O����(sh��)���D(zhu��n)�ӑT��������늄ӄݡ�Ħ��ϵ��(sh��)�������ӣ�Tf����f�քe��ؓ(f��)�d�D(zhu��n)�ء��D(zhu��n)�������w�a(ch��n)���Ĵ�朡�
2�ŷ�ϵ�y(t��ng)Ӳ���O(sh��)Ӌ
TMs320F2812������TI��˾TMS320F281xϵ���е�һ�N���c(di��n)DsP��ԓоƬ���ڲ��ø������o�B(t��i)cM0s���g(sh��)��ʹ�ù��늉�����3��3 v�����pС�˿������Ĺ��ġ�TMS320F28lx�ṩ�ˏ�(qi��ng)���Ӌ��������****�\(y��n)���ٶȿ��_(d��)��150 MIPS(ÿ����f�lָ��)����(y��ng)����늙C(j��)�Ĕ�(sh��)�ֻ������@���������ࡣTMS��320F2812�c�F(xi��n)��24x DsPоƬ���a���ݵ�ͬ�r������̎���Ը���(qi��ng)�����O(sh��)���ɶȸ��ߡ�����惦������A��D�D(zhu��n)�Q�ٶȸ�������c(di��n)��
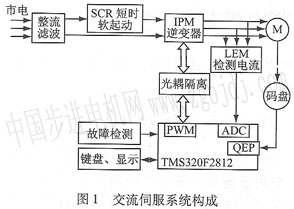
����TMS320F2812��PMSM�ŷ�����ϵ�y(t��ng)Ӳ���Y(ji��)��(g��u)��Dl��ʾ��
(1)λ���c�D(zhu��n)�ٙz�y��늄әC(j��)�ĴŘOλ�ü����D(zhu��n)�ٷ�����̖������ͨ������ʽ�Ĺ�늾��a����ԓ���a������A��B��z��u��v��w�����}�_ݔ����̖�����90o��A��B�}�_��̖����λ���c�D(zhu��n)�ٵęz�y��늙C(j��)�D(zhu��n)����Єe��z��̖��ÿ�D(zhu��n)ݔ��һ���}�_����λ������̖��u��V��w��̖�t����늙C(j��)�D(zhu��n)�ӵij�ʼ��λ��TM$320F2812�¼�����ģ�K����������a�}�_�·(QFP�·)����(d��ng)ԓ�·��ʹ�ܺ����_cAPl��QEPl��cAP2��QEP2�����}�_�����M(j��n)�н�a��Ӌ��(sh��)����늾��a��ݔ�����������a�}�_��(j��ng)�ӿ��·ݔ�뵽DsP��OEP�·ݔ��ˣ�ͨ�^QEP�·�����յ����}�_�M(j��n)�н�a��̎�����Ķ��@��늙C(j��)�D(zhu��n)�ӵ�λ�ü��ٶ���Ϣ��
(2)��������ęz�y�����˝M��������ŷ�ϵ�y(t��ng)��Ҫ�����ϵ�y(t��ng)������h(hu��n)푑�(y��ng)�ٶȣ�����z�y���û������������(LEM)����(sh��)�H�z�y�������ֻ��ɂ�lFM���ɡ�����TMS320F2812��A��Dݔ����̖������O��3 V�����Ի���Ԫ���z�y���������̖�׃�Q��늉���̖���ٽ�(j��ng)�^�V���Ŵ��O��3 V�^(q��)�g��(n��i)׃����ģ�M늉���̖��ݔ�뵽DsPоƬ��(n��i)��ADcģ�K��
(3)���ϙz�y�����o(h��)�����ϙz�y�����o(h��)�����^�����o(h��)���^�����o(h��)�����ܹ���ģ�K(IPM)�ı��o(h��)����늙C(j��)�Ƅ��^���У�늙C(j��)�����D(zhu��n)�C(j��)е�܌�����׃���D(zhu��n)������ܷ��͵�ֱ����(c��)���������·������ɿؘ�ʽ���������܌�ֱ����(c��)����ܷ���늾W(w��ng)������݃ɶ�늉������ߣ��@��Σ�������İ�ȫ����ˣ������·���O(sh��)���^���z�y�·����(d��ng)�������w�r��늘�����п����^���M(j��n)���p�� |