�_�P����ƽ��늄әC�OӋ�c����
�R���࣬����������£����
(̫ԭ������W��ɽ��̫ԭ030024)
ժҪ���S���댧�w�����ܼӹ����g�Ŀ��ٰlչ����ƽ�涨λ���ӹ����b��Cе��Ҫ��Խ��Խ�ߡ��OӋ��һ�N�Y���·f���_�P����ƽ��늄әC������ֱ���ӷ�ʽ��ʡȥ�˂��yƽ��늄әC�Џ��s�ęCе���әC�����ڌ��_�P����ƽ��늄әC�\�әC�������c�о��Ļ��A�ϣ��OӋ�ˌ��әC�Ļ����Y���;��w����������Ansoft xwell 3D�h�����M���˷��挍��C����Փ������Ӌ��Y�������_�ԣ����_�P����ƽ��늄әC���Mһ���о��춨����Փ���A��
�P�I�~���_�P����ƽ��늄әC��ֱ���ӣ�Maxwell 3D����
�ЈD���̖��TM352 �īI���R�a��A ���¾�̖��1004��7018(2008)07��0015��03
0�� ��
�댧�w���g�����ܼӹ������I����ICоƬ�ӹ�����λ���b��Cе�Լ��C�������b�ã�����Ҫ���ٶȡ��߾��ȵ�ƽ�涨λ�c�\�ӿ��ơ������y��ƽ��ӹ��b���Ƀ���ֱ��늄әC(���Ɍ�)�M�ɣ��ı��|�ϛ]�Д[Ó���;S�\�әC���B���γɸ߾S�\�әC������ģʽ�����ڵӵ�ֱ��늄әC���ԣ���ȻҪ���d�ό�ֱ��늄әC�������P�Cе�����Ŀ��|�����Ķ�����Ӱ��˶�λ����[1]����ˣ���������������Сԭ�����OӋ��ֱ�ʽ�_�P����ƽ��늄әC���_���˽Y������������Ansort Maxwell 3D�h�����M���˷����о����L����λ���c늴�����λ���c늴��������Pϵ��������C���OӋ��Փ�����_�ԡ�
1�����Y��
�_�P����ƽ��늄әC(���º��QSRPM)�����Dʽ�_�P����늄әC��׃���������_�P����늄әC�ӏ������_������x��y�ɂ�������չ�����γ���SRPM���r�Ρ����Dʽ�_�P����늄әC���D�ӺͶ��Ӽ���SRPM�Ą��ӺͶ��ӡ�SRPM�Ą��ӺͶ��Ӿ����F�Ų��Ϙ��ɣ������ϰ��b�����@�M�������ӟo���@�M��Ҳ����Ҫ�����w��
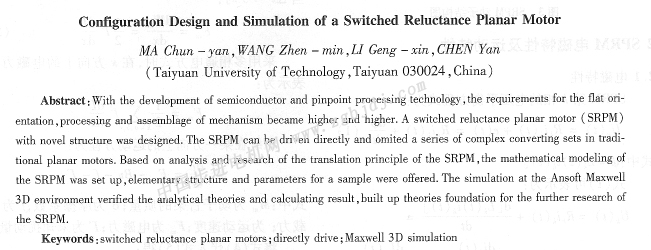
SRPM�Ʉ��ӡ����ӡ�λ�Ùz�y�b�ú�֧�β����M�ɣ���D1��ʾ[1]��
1.1���ӽY��
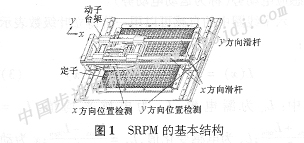
�����ɶ����Π���ͬ�Ķ��ӉK�����Ӷ��ɣ����íh���zճ����һ��ÿһ�����ӉK�ɹ��Ƭ�B�b���ɣ����Ƭ�įB�b����c�X����ͬ���@�ӣ���x��y�������γɶ��l��ͬ�Ĵ�·ͨ�������ӵįBƬ�Π�γɵľW��Y����D2��ʾ��
1��2���ӽY��
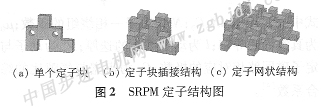
�����Ƀ����������Ӿ�Ȧ�M�ɣ����˜pСx�cy�����ϵĴ�·������ã�������ͬ�Ą��Ӿ�Ȧ���ֱ�ع̶��ڄ����_���ϣ�һ��ؓ؟x������\�ӣ���һ��ؓ؟y������\�ӡ����ӵĽY����������r��D3��ʾ��
2 SPRM늴����Լ��\������
2.1늴�����
SPRM��k���늉�ƽ�ⷽ��ʽ�飺

��ʽ�Ҷ˵�һ헞���艺�����ڶ�������׃���a���ĸБ�늄ӄݣ�������Ʉ���λ��׃���a���ĸБ�늄ӄ�(�Q���\��늄ӄ�)��
������Ȧ�е��Ըп�����һ�A�����~������ʾ�飺
2.2�\������
SPRM�����_�ܵ�ƽ���\������x��y������ֱ���\�Ӻϳɵġ����oijһ������@�M(x��y����)ͨ늕r���Ń��ܞ飺

ʽ(6)����늴����Ĵ�Сȡ�Q��������Ĵ�С�̈́��ӵ�λ�ƣ������cz�S�෴���������׃����ô��늴����cλ�Ƴ�����׃��Ҏ�ɡ���ʽ(6)��֪��
3 SRPM�ĽY���OӋ
SRPM�ĽY���OӋ��Ҫ�����������X�� |



