����ȫ�ֻ�ģ����������ͬ��늄әC�еđ���
�������������S
(�Ͼ����պ����W�����K�Ͼ�210016)
ժҪ����һ�N�µ�׃�e���ГQ�����ȫ�ֻ�ģ���Ʋ��ԑ���������ͬ��늄әC(PMSM)��ʸ�������У��Ƚ�Q�˂��y��ģ�����е�څ��ģ�B�����������Ե�ȱ�c�����Q��ģ�����еĶ����}������Y��������ԓ������ϵ�y�������_�����ⲿ�ɔ_�Ⱦ��к��������ԣ�ϵ�y��Ʒ�|��������ģ׃�Y�����ƵĶ���Ҳ
�õ������@���ơ�
�P�I�~��׃�e���ГQ���棻ȫ�ֻ�ģ������ͬ��늄әC
0 �� ��
�ڌ��H�����У�����ͬ��늄әC(PMSM)���ھ��нY�����Ρ������ܶȴ�Ч�ʸߵȃ��c�����t����е���x���x�����C���ˡ�Ӌ��C���O�����ؙC���ȷ���õ���Խ��Խ�V���đ��á�������PMSM��һ����׃��������ϡ��Ǿ��ԡ�׃�����ď��s�����ڌ��H�����У��������ɔ_���Ȳ��z�ӵȲ��_�����ص�Ӱ푣���һЩ����Ҫ���^�ߵĈ��ϣ����yPID���y�_��ϵ�y��Ҫ��ģ׃�Y������(sMc)������ܺõؽ�Q���@Щ���}�����nj��Ǿ��ԡ����_����ϵ�y��һ�N��Ч�ľC�Ϸ�������ϵ�y�ą����z�Ӻ���ɔ_�������Էdz������ҽY�����Ρ�푑��ٶȿ졣����������ȡ����о��ˆT�Lԇ��SMC�����ڸ��늙C���ŷ�ϵ�y�С��о������������ӽoϵ�y�Ĕ_�Ӻ�ϵ�y�ą���׃�������У�푑��ٶȿ죻ͬ�r�����ϵ�y�ľ��Ⱥ������ԡ�Ҳ�ЌW���_ʼ̽����PMSM�{��ϵ�y�Б���sMc���g�����īI[5]��SMc����PMsM�oλ�Â������{��ϵ�y��������ٶ��^�y���ľ��ȡ��īI[6]��SMC������PMSM��ֱ���D�ؿ��ƣ�������׃ָ��څ���ʣ��������D�غʹ���}�Ӵ�Ć��}����ģ׃�Y���Ķ���Ҳ�õ������@���ơ�
���y��ģ׃�Y��ϵ�y��푑�����څ��ģ�B�ͻ���ģ�B�ɲ��֣�ԓ�ϵ�y��ϵ�y�����IJ��_���Ժ��ⲿ�_�ӵ������ԃH�����ڻ���ģ�B�A�Σ�ϵ�y�Ą����W������푑���ȫ�^�̲������������ԡ�ȫ�ֻ�ģ������ͨ�^�OӋһ�N�ӑB�Ǿ��Ի�ģ�淽�̣�ʹϵ�y��푑���ȫ�^�̶����������ԣ��˷��˂��y��ģ׃�Y�������е��_ģ�B�����������Ե�ȱ�c��
���IJ���һ�N�µ�׃�e���ГQ����ȫ�ֻ�ģ�������Ϳ��gʸ���}���{��(sVPwM)��Y�ϵķ������OӋ��һ��PMSM�{��ϵ�y��ԓ����������ȫ�ֻ�ģ�ГQ������ʹϵ�yһ�_ʼ�;��������ԣ��������������һ�N���͵���������B׃������څ��ԭ�c����Խ��ģ��ķ��Ȳ���׃���������ֵ�����pС��ϵ�y�M�뷀�B����ԭ�c������F����ʧ����Q�˻�ģ׃�Y�����еĶ����}��
1 PMSM�Ĕ��Wģ��
�ڲ�Ӱ푿������ܵ�ǰ���£����O��·��ͣ���Ӌ�Ŝ��͜u���p�ĵ�Ӱ푣����g�ň������ҷֲ�������id=O��PMSM�D�Ӵň����ƣ��D�صĴ�Сֻ�c���������ֵ�����ȣ����F��PMSM�Ľ�����ƣ��˕r�У�
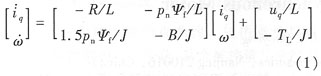
PMSM��늴��D�ط��̞飺
PMSM���\�ӷ��̞飺
ʽ��iq����q�S�����A��
uq����g�S늉���V��
R������������裬n��
L������Чd��g�S늸У�H��
Pn�����O������
��f�����D�������w�a���Ĵ��B��wb��
�ء����D�әCе���ٶȣ�mad��s��
J�������㵽늙C�S�ϵĿ��D�ӑT����kg��m2��
B����ճ��Ħ����N.m.s��
TL�������㵽늙C�S�ϵĿ�ؓ�d�D�أ�N.m��
2��ģ�漰���Ʋ����OӋ
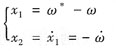
ȡϵ�y�Ġ�B׃���飺
ʽ�У���(��̖)�����o���D�٣�
�ء������H�D�١�
����ʽ(1)��(3)�ɵã�
�ɵ�ϵ�y�Ġ�B���g���_ʽ�飺
|