����λ�ú��ٶȹ��������ͬ��늄әC�o����������
������
(���Ϲ��I�I���g�WԺ�������Lɳ410208)
ժҪ��ʹ�Ô�����̖������dsPIc601OA����ܛ����ʽ���F����ͬ��늄әC�ğo�������ň�������ƣ����c������늙Cλ�ú��ٶȵĹ����^�̡�λ�ú��ٶ�ֵ�Ǹ����y�������Ӌ��늉��õ��ģ�λ�ú��ٶȹ�������������^�y����������
�P�I�~��������̖������������ͬ��늄әC���o������������^�y��
�ЈD���̖��TM341 �īI���R�a��A ���¾�̖��1004-7018(2008)07-0042-03
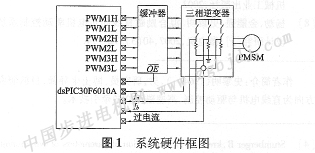
1 ϵ�y����
��D1��ʾ[1]������ͬ��늄әC(���º��QPMsM)�S�ϛ]�а��bλ�Â���������ʹ�õ���ֵ�z�y����y��늙C�ϵ������������׃�����������ʼ�����늙C�@�M��
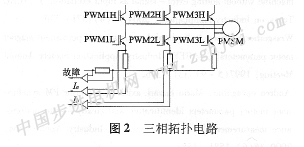
�Դ��׃�����õ�����z�y���������·�ɷ�ֹ����ϵ�y�ܵ��^����ēp�ġ��D2�@ʾ�������ؓ��Լ�����z�y���������·[2]��
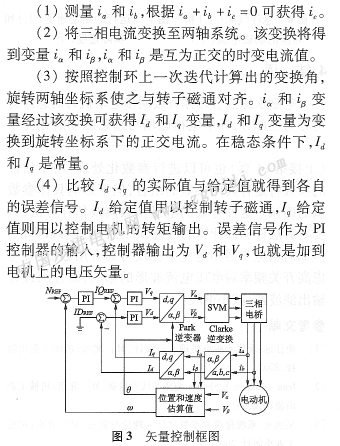
2 �������
�D3��ň�������Ƶ�����׃�Q��PI��������׃�Q�Լ�PWM�a���������^�̡��������g��ʸ�����ƵČ��F���E��
(5)Ӌ���µ�����׃�Q�ǡ��µĽǶȌ���֪�㷨��һ��늉�ʸ���ں�̎��
(6)ͨ�^ʹ���µĽǶȿɌ�PI��������ݔ��׃��Vd��Vq׃�Q���oֹ��������ϵ��ԓӋ�㌢�a������늉�ֵV����V�¡�
(7)V����V�±�ֵ���^��׃�Q�õ�����늉�ֵVa.Vb��Vc��ԓ����늉�ֵ�Á�Ӌ���µ�PWMռ�ձ���������������늉�ʸ����
3늙Cλ�ú��ٶȵĹ���
�o���������Ƽ��g��ͨ�^����늙Cλ�Á팍�F�ň��������FOC�㷨��늙C��λ���Ǹ����y�������Ӌ��늉��õ��ġ�
3 1늙Cģ��
����ͨ�^ʹ��һ��ֱ��늙Cģ�́�����PMSM��λ�á�ԓ늙Cģ�����@�M��衢�@�M늸кͷ�늄ӄ݁���ʾ��
ʹ���f�ñ����ɜy��������R��L�����˿���Ӌ���F��G��ֵ��
3.2����^�y��
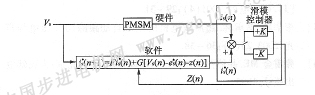
λ�ú��ٶȹ������ǻ�������^�y���������ġ�ԓ�^�y����һ�����ֻ�ģ�ͣ�ԓ���ֻ�ģ�͌�Ӳ��������ܛ����ʾ��ʽ��Ȼ��������ʹ�y��������������ƥ�䣬���ֻ�늙Cģ����Ҫʹ����D4��ʾ���]�h���Ɓ��M��У����
���]�ÃɷN��ʽ��ʾ늙C��һ�N��Ӳ����ʽ����һ�N��ܛ����ʽ���ɂ�ϵ�y��ʹ����ͬ��ݔ��늉�
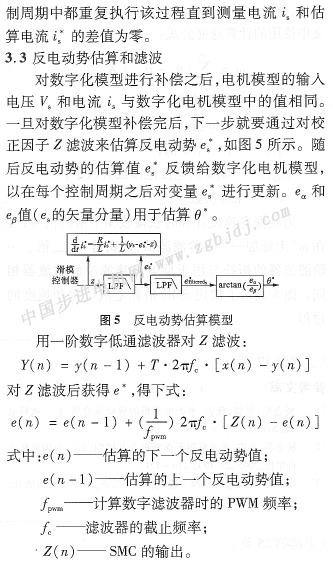
��ģ������(���º��QSMC)�Á팦���ֻ�늙Cģ���M���a����SMC����һ����ͽY�c������Ӌ��늙C�ϵĜy������c���ֻ�늙Cģ���ϵĹ������֮��ķ�̖��Ӌ����IJ�ֵ��̖(+1��-1)����SMC����K��SMC��������ݔ������У������Z��ԓ���汻�ӵ����ֻ�ģ�͵�늉�헣���ÿһ����
�V�����Ľ�ֹ�l��ֵȡ�Q�ڻ���ģʽ������������x��ͨ�^�Lԇ�������M���{�����O��ԓֵ����һ���V������ݔ�����ڃɂ�ģ�K�С���һ��ģ�K
|