��τ�(l��)��ֱ��ͬ��늄�(d��ng)�C(j��)�Ҹ������������O(sh��)Ӌ(j��)
ʷ����1���x��1,2
(1.�Ї�(gu��)�ƌW(xu��)Ժ늹��о���������100080��2.�Ї�(gu��)�ƌW(xu��)Ժ�о���Ժ������100080)
ժҪ��������늴����Ż�ϴ��wֱ��ͬ��늄�(d��ng)�C(j��)�đҸ����͠���������(l��)�ŴŘO�c늘�֮��(w��n)�Ҹ������P(gu��n)ϵ���Էֽ�������֣����Є�(l��)�Ŵň�(ch��ng)��늘дň�(ch��ng)֮�g����õķ�������a(ch��n)���Ҹ�������������a(ch��n)�����������ڴ˻��A(ch��)�ό�(d��o)���ˌ�(sh��)�F(xi��n)�Ҹ����c��������(d��)�����Ƶ��㷨���O(sh��)Ӌ(j��)�ˑҸ��c������������늙C(j��)�ň�(ch��ng)�����(q��)��(d��ng)�����У�ͨ�^(gu��)��(sh��)ʩ��(du��)����d�S���������ƿ���****�̶ȜpС��(du��)�Ҹ���Ӱ푡���(sh��)�(y��n)�Y(ji��)����������Ч�����˝M�⡣
�P(gu��n)�I�~����ϴ��w��ֱ��ͬ��늄�(d��ng)�C(j��)��������Ʒ������ň�(ch��ng)��ͬ����
�ЈD���̖(h��o)��TM359.4 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004-7018��2008��07-0039-03
O �� ��
��ϴ��wֱ��ͬ��늄�(d��ng)�C(j��)�������Ų��ϼ�늴��@�M�Ļ�Ϸ�ʽ��(l��)�ţ��øߴ��ܷe�������w�a(ch��n)��������������ƽ�ⲿ������ȫ��܇ؓ(f��)�d�������Ķ�ʹ�Ҹ��r(sh��)��(l��)��������p�٣���(l��)�œp���@������[1,3]��
ͨ�����Ҹ����͠�������ͨ�^(gu��)���w��(l��)������Ͷ���늘�����քe�Ϊ�(d��)���Ƶġ�����ͨ�^(gu��)������϶�еĿ��g�ň�(ch��ng)����֪�@�ɂ�(g��)��������һ��[4,5]������늘�����ķ�ֵ���c��(l��)�Ŵ��w֮�g����λ�P(gu��n)ϵ��(hu��)Ӱ푑Ҹ����͠��������Ҹ���϶�ĸ�׃Ҳ��(hu��)Ӱ��(q��)��(d��ng)���ơ���������ˑҸ����͠������Ľ�������㷨��������d�S����������ʸ�����ƿ��Ի�������늘������(du��)�Ҹ�����Ӱ푡�
�D1�����Ƶ����c(di��n)늴����Ż�ϴ��w�Ҹ��c����ϵ�y(t��ng)ԇ�(y��n)?z��i)���܇�b�Ì�(sh��)����Ƭ��ϵ�y(t��ng)����6 m�L(zh��ng)���p߅�L(zh��ng)����܉�����Ҹ����b�á�����ϵ�y(t��ng)�����֡��~���Ҹ��g϶12.5 mm���Ҹ��������s130kg��
1 ��ϴ��wֱ��ͬ��늄�(d��ng)�C(j��)���ķ���
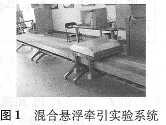
��ϴ��wֱ��ͬ��늄�(d��ng)�C(j��)��(l��)�Ŵ��w�c늘�֮�g�a(ch��n)���ɷN��������ֱ����đҸ�����ˮƽ����Ġ��������D2�����ƵĻ�ϴ��wֱ��ͬ��늄�(d��ng)�C(j��)��һ��(g��)���w��늘нY(ji��)��(g��u)��
늴����Ż�ϴ��w�Ҹ�����ϵ�y(t��ng)�đҸ����͠���������ͨ�^(gu��)�ň�(ch��ng)��ģ����Փ�õ�[3,4]�����]��ϴ�ֱ��ͬ��늙C(j��)���OЧ��(y��ng)���t�������͑Ҹ������Էքe��ʾ�飺
2 �Ҹ����͠������������O(sh��)Ӌ(j��)
���ˌ�(sh��)�F(xi��n)��(du��)ԓ�Ҹ�܇�v�����ÿ��ƣ�����ֱ�����Ϸ�(w��n)���Ҹ���ijһ��϶�߶Ⱥ�ˮƽ�����ϰ��o�����ٶȡ�λ���������_�\(y��n)�У���Ҫ���ƑҸ����͠����������ɔ_��������
Ҫ��(sh��)�F(xi��n)��ϴ��wֱ��ͬ��늄�(d��ng)�C(j��)�Ҹ����͠���
3 ��(d��ng)�B(t��i)�Ҹ��c����ԇ�(y��n)
���ƌ�(sh��)�(y��n)�в�����ͨ�^(gu��)�{(di��o)��(ji��)��(l��)�������(sh��)�F(xi��n)�Ҹ����ơ��{(di��o)��(ji��)늘��������ʹ���Ǟ��㣬��id=O��(sh��)�F(xi��n)�������Ƶķ������(q��)��(d��ng)����ϵ�y(t��ng)��Ӳ��ϵ�y(t��ng)��Ҫ�ɔ�(sh��)����̖(h��o)̎����(DSP)��늙C(j��)������z�y(c��)�·����(d��ng)��λ�Ùz�y(c��)�·�������(q��)��(d��ng)���o(h��)�·����λ�C(j��)ͨӍ�·���(q��)��(d��ng)��Ԫ�Ȳ��ֽM��[7]��
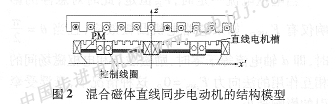
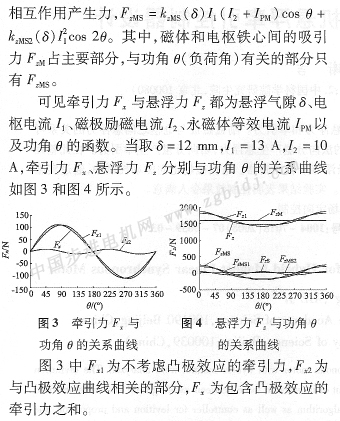
�D6��ģ��܇�ɂ�(g��)���w�đҸ���϶�͌�(du��)��(y��ng)�Ą�(l��)��������Ρ�ʾ�����M�S�̶Ȟ�10/��ģ��܇�ij�ʼ?x��)�϶λ�?8.2 mm�_(k��i)ʼ����(w��n)���Ҹ���Ŀ��(bi��o) |