���ڿ������V����smo������ͬ��늙C(j��)�o(w��)������ʸ������
��܊�������������
(1�A�|������W(xu��)��Ϣ�ƌW(xu��)���̌W(xu��)Ժ���Ϻ�200237��
2�Ϻ�늙C(j��)�W(xu��)Ժ늚�W(xu��)Ժ���Ϻ�200240)
ժҪ����(du��)����ͬ��늙C(j��)��(sh��)�W(xu��)ģ���M(j��n)���������������û�ģ��B(t��i)�^�y(c��)����(sh��)�F(xi��n)��(du��)pmsm�o(w��)�������D(zhu��n)��λ�ú��ٶȹ��㣬���뿨�����V�������Ķ�ʹ�û�ģ�^�y(c��)����늄�(sh��)���θ���ƽ���͜�(zh��n)�_��Ҳ���m�ϸ����ܑ�(y��ng)�á���simulink�����(y��n)�C���㷨�����_�ԺͿ����ԣ�����(du��)�Y(ji��)���M(j��n)���˷���ӑՓ��
�P(gu��n)�I�~������ͬ��늄�(d��ng)�C(j��)����ģ�^�y(c��)�����������V�������o(w��)������
o �� ��
������ͬ��늙C(j��)(pmsm)ʸ������ϵ�y(t��ng)�У�ͨ�����D(zhu��n)�S�ϰ��b��������(l��i)�z�y(c��)�D(zhu��n)�ӵČ�(sh��)�Hλ�ú��ٶȣ��M(j��n)����(sh��)�F(xi��n)�D(zhu��n)�Ӵň�(ch��ng)������ơ���������������ϵ�y(t��ng)�ijɱ���������ϵ�y(t��ng)�Ŀɿ��ԡ����˿˷��C(j��)е�������o늙C(j��)ϵ�y(t��ng)����(l��i)��ȱ�ݣ��аl(f��)һ�N�ɱ��͡��ɿ��Ժá��S�o(h��)��(ji��n)�εğo(w��)λ�ú��ٶȂ������Ŀ��Ʒ����������늙C(j��)���Ƽ��g(sh��)�I(l��ng)��ğ��c(di��n)֮һ��
Ŀǰ�������D(zhu��n)��λ�ýǵķ�����Ҫ�ж��Ӵ�朹��㷨��ģ�ͅ������m��(y��ng)������B(t��i)�^�y(c��)�����㷨���˹����ܷ��ȣ����д����(sh��)���㷽������Ҫ���Ü�(zh��n)�_��늙C(j��)����(sh��)��(l��i)�M(j��n)�й��㡣pmsm��һ��(g��)��׃������(qi��ng)��ϡ��Ǿ�(xi��n)�ԡ�׃����(sh��)�ď�(f��)�s��(du��)�����ڌ�(sh��)�H��(y��ng)���У�pmsm���S�\(y��n)�й��r׃���ġ��c���y(t��ng)������ȣ���ģ���ƌ�(du��)ϵ�y(t��ng)��(sh��)�W(xu��)ģ�͵ľ��_��Ҫ�ߣ���(du��)��ϵ�y(t��ng)�ą���(sh��)���_���Լ����_��(d��ng)�Ⱦ�����ȫ�����ԣ���ģ�����ڽ����ŷ�ϵ�y(t��ng)�����I(l��ng)��չʾ�����õđ�(y��ng)��ǰ����������Ҫ�о����ڻ�ģ�^�y(c��)����pmsmϵ�y(t��ng)ģ�ͺͿ����㷨����(sh��)�F(xi��n)pmsm�o(w��)���������ơ�
l pmsm������(bi��o)ϵ�͔�(sh��)�W(xu��)ģ��
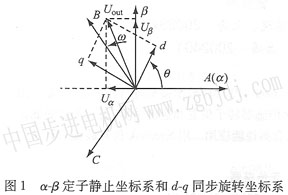
pmsm�{(di��o)�ٿ����У����õ���d-qͬ�����D(zhu��n)����(bi��o)ϵ�ͦ�-�¶����oֹ����(bi��o)ϵ�µĔ�(sh��)�W(xu��)ģ�ͣ�����(bi��o)ϵ��D1��ʾ��
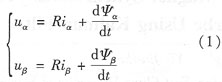
�ڦ�-������(bi��o)ϵ�£�pmsm��B(t��i)�������£�
늉����̣�
��朷��̣�
늴��D(zhu��n)�ط��̣�
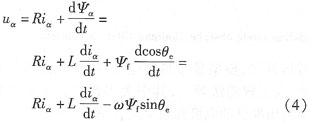
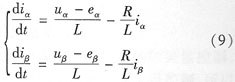
��ʽ(2)����ʽ(1)�ɵã�
�����ɵã�
ͬ����
��(d��ng)��
�У�
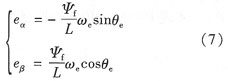
���Ԧ�-�¶����oֹ����(bi��o)ϵ�µ�pmsm��(sh��)�W(xu��)ģ�Ϳ��Ԍ�(xi��)�ɣ�
ͨ����simulink��p]msmݔ��ֻ���oֹ����(bi��o)ϵabc�µ����ֵ���@�Ӿ���Ҫ�M(j��n)������(bi��o)׃�Q�������D(zhu��n)�Q����-������(bi��o)ϵ�£�Ȼ��������黬ģ�^�y(c��)����ݔ���M(j��n)��Ӌ(j��)�㡣
2��ģ�^�y(c��)����(sh��)�F(xi��n)λ�ù���
����(j��)��ģ׃�Y(ji��)��(g��u)����Փ����(du��)ϵ�y(t��ng)��
���x��ģ�棺
s=s(x)=o (11)
���ƺ���(sh��)�飺
ֻҪ�M(m��n)��  ��ģ�^�y(c��)���Ϳ��������ĕr(sh��)�g��(n��i)���_(d��)��ģ�沢�������M(j��n)�л�ģ�\(y��n)��(d��ng)���˕r(sh��)���ڻ�ģ���Ͼ���  ���xpmsm�Ļ�ģ��� ����  |