öĄūųRDCį┌PMSM┐žųŲŽĄĮyųąĄ─æ¬ė├
▒®Į▄Ż¼ŚŅž¤Į▄Ż¼┌wĮ┴╝
(╣■Ā¢×I╣żśI┤¾īWŻ¼║┌²łĮŁ╣■Ā¢×I150001)
š¬ę¬Ż║×ķśŗįņĮYśŗ║åå╬Īó│╔▒ŠĄ═┴«Īó┐╔┐┐ąįĖ▀Ą─╚½öĄūų╗»ė└┤┼═¼▓ĮļŖäėÖC(PMsM)“īäė┐žųŲŽĄĮyŻ¼╠ß│÷┴╦ę╗ĘNŠ▀ėą┬Ī▓«Ė±(Luenber)ė^£yŲ„ĮYśŗĄ─öĄūų▌SĮŪūāōQ╦ŃĘ©Ż║└¹ė├MadahŻ¼ nk▀Mąą▄ø╝■Ę┬šµŻ¼▓óō■┤╦┤ŅĮ©┴╦╗∙ė┌öĄūųRDcĄ─PMsM╩Ė┴┐┐žųŲŲĮ┼_ĪŻĘ┬šµ║═īŹ“×ĮY╣¹▒Ē├„Ż¼▀@ĘN╦ŃĘ©┐╣Ė╔ö_─▄┴”ÅŖŻ¼─▄ē“īŹ¼FŠ½Č╚▌^Ė▀Ą─ļŖÖC▐Dūė┤┼śO╬╗ų├Öz£yŻ¼Ė─╔Ų┴╦╦┼Ę■┐žųŲŽĄĮyĄ─▀\ąąąį─▄
ĻPµIį~Ż║┬Ī▓«Ė±ė^£yŲ„Ż╗öĄūų▌SĮŪūāōQŲ„Ż╗ą²▐Dūāē║Ų„Ż╗ė└┤┼═¼▓ĮļŖäėÖC
ųąłDĘųŅÉ╠¢Ż║TM41 ╬─½Iś╦ūR┤aŻ║A ╬─š┬ŠÄ╠¢Ż║1004Ī¬7018(2009)12Ī¬0050Ī¬03
0ę² čį
į┌ė└┤┼═¼▓ĮļŖäėÖC(ęįŽ┬║åĘQPMsM)Ą─Š½├▄╦┼Ę■“īäė┐žųŲŽĄĮyųąŻ¼½@Ą├Š½£╩Ą─▐Dūė┤┼śO╬╗ų├ą┼Žóė╚×ķųžę¬Ż¼┤┼śO╬╗ų├Ą─£╩┤_┼cʱų▒ĮėĻPŽĄĄĮŽĄĮyĄ─▀\ąąąį─▄ĪŻĶbė┌PMSMĄ─▐Dūė┤┼śO╬╗ų├╩Ū╬’└Ē┐╔ė^£yĄ─Ż¼×ķ┴╦Ą├ĄĮ£╩┤_Ą─▐Dūė╬╗ų├ą┼ŽóŻ¼╣ż│╠╔ŽĄ─ę╗░Ńū÷Ę©╩Ūį┌ļŖÖC╔Ž░▓čbĖ▀Š½Č╚Ą─¬Ü┴ó╬╗ų├é„ĖąŲ„Ż║é„ĖąŲ„ėą****ŠÄ┤aŲ„Īóį÷┴┐ŠÄ┤aŲ„ęį╝░ą²▐Dūāē║Ų„Ą╚ÄūĘNĪŻŲõųąŻ¼ą²▐Dūāē║Ų„└¦Ųõ┐╣Ė╔ö_║═▀mæ¬Łh─▄┴”ÅŖŻ¼ĘŌčb│▀┤ńąĪĪóę²ŠĆ╔┘Ż¼░▓čbĘĮ▒ŃĪó╩╣ė├┐╔┐┐Č°éõ╩▄ŪÓ▓ŪŻ¼æ¬ė├ÅVĘ║ĪŻą²▐Dūāē║Ų„Ą─▌ö│÷ą┼╠¢╩ŪĖ▀Ņlš{ųŲ┴┐Ż¼ę¬½@Ą├┐žųŲļŖ┬Ę╦∙ąĶĄ─öĄūų╬╗ų├ą┼╠¢Ż¼▒žĒÜ═©▀^▌SĮŪūāōQŲ„(RDc)ī”ą²▐Dūāē║Ų„▌ö│÷Ą──ŻöMą┼╠¢▀MąąĮŌš{║═ūāōQŻ¼ąĶę¬Ė▀Š½Č╚Ą─RDcąŠŲ¼ū÷ė▓╝■ų¦│ųĪŻ╚╗Č°Ż¼Ė▀Š½Č╚Ą─īŻė├RDcąŠŲ¼ārĖ±░║┘FŻ¼Įė┐┌ļŖ┬ĘÅ═ļsŻ¼ī”Ė▀Ņlš{ųŲĄ─╬╗ų├ą┼╠¢Ģ■«a╔·įŁ└ĒąįĄ─ŽÓ╬╗£■║¾Ż¼ę▓¤oĘ©Ė·█Ö╝ė╦┘Č╚▓╗×ķ┴Ń║═ūā╝ė╦┘Č╚Ą─╬╗ų├ą┼╠¢Ż¼▀@ą®Č╝╩╣Ą├ŽĄĮyĄ─Ė▀äėæB▀\ąąąį─▄╩▄ĄĮŽ▐ųŲĪŻ×ķĮĄĄ═│╔▒ŠŻ¼Ė─╔ŲŽĄĮyĄ─▀\ąąąį─▄Ż¼ėąīWš▀╠ß│÷┴╦▓╔ė├▄ø╝■╦ŃĘ©üĒīŹ¼F▌SĮŪūāōQŲ„Ą─ĘĮ░ĖŻ¼╝┤╦∙ų^Ą─öĄūųRDc╝╝ągĪŻé„ĮyĄ─öĄūųRDc╦ŃĘ©ų„ę¬ėąĘ┤š²ŪąĘ©║═µiŽÓŁhĘ©[1-4]ĪŻĄ╚ĪŻĘ┤š²Ūą╦ŃĘ©┐╣Ė╔ö_─▄┴”▓ŅŻ¼µiŽÓŁh╦ŃĘ©į┌▐Dūė▀\äėą╬╩ĮÅ═ļsūā╗»Ģr┤µį┌įŁ└Ēš`▓ŅĪŻßśī”ęį╔Žå¢Ņ}Ż¼▒Š╬─śŗįņ┴╦╗∙ė┌┬Ī▓«Ė±ė^£yŲ„Ą─öĄūųRDcŻ¼╝╚▒Ż┴¶▄ø╝■īŹ¼FRDcĄ─ā׳cŻ¼ėų┐╔Ž¹│²╦┼Ę■ŽĄĮyųąė╔ė┌ą²▐Dūāē║Ų„╦∙ę²ŲĄ─ŽÓ╬╗
£■║¾Ą╚å¢Ņ}Ż¼ėąą¦╠ßĖ▀┴╦ŽĄĮyĄ─┐╣Ė╔ö_─▄┴”║═äėæB╠žąįŻ«
1╗∙ė┌┬Ī▓«Ė±ė^£yŲ„Ą─öĄūųRDcśŗįņ
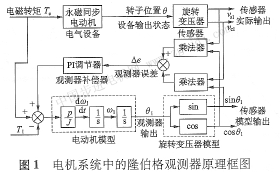
┬Ī▓«Ė±ė^£yŲ„[5-7]╩Ūę╗ĘNŠ▀ėąūį▀mæ¬ĮYśŗĄ─ė^£yŲ„Ż¼ŲõīŹ┘|╩ŪĀŅæBųžśŗĪŻ╗∙▒ŠįŁ└Ē╩Ū└¹ė├įŁŽĄĮyųą┐╔ų▒Įė£y┴┐ĄĮĄ─ūā┴┐ū„×ķą┬śŗįņŽĄĮyĄ─▌ö╚ļą┼╠¢Ż¼▓ó╩╣ųžśŗĀŅæBį┌ę╗Č©Ą─Śl╝■Ž┬Ą╚ārė┌įŁŽĄĮyĀŅæBŻ¼Ą╚ārĄ─įŁätŠ═╩Ūā╔š▀Ą─š`▓Ņį┌äėæBūā╗»ųą─▄ē“ØuĮ³ĘĆČ©▓óŪę┌ģĮ³ė┌┴ŃĪŻę“┤╦╦³╩Ūę╗ĘNĘ┤üąŻš²ĘĮ╩ĮĄ─ķ]ŁhĀŅæB╣└ėŗŻ¼┐╔ęį’@ų°╠ßĖ▀╦┼Ę■ŽĄĮy┐╦Ę■ģóöĄė░ĒæĄ─äéąįĪŻ┬Ī▓«Ė±ė^£yŲ„ė╔ęįŽ┬╬ÕéĆ▓┐ĘųĮM│╔[8]Ż║é„ĖąŲ„▌ö│÷Īó╣”┬╩ūāōQŲ„▌ö│÷(ļŖÜŌįOéõĄ─“īäė▌ö╚ļ)ĪóļŖÜŌįOéõöĄīW─Żą═Īóé„ĖąŲ„öĄīW─Żą═ęį╝░ė^£yŲ„čaāöŲ„å╬į¬ĪŻĖ∙ō■┬Ī▓«Ė±ė^£yŲ„Ą─įŁ└Ē║═ĮYśŗŻ¼╚ĪļŖÜŌįOéõ“īäė▌ö╚ļ×ķļŖÖCļŖ┤┼▐DŠžTeŻ¼ļŖÜŌįOéõ×ķļŖäėÖCŻ¼é„ĖąŲ„×ķą²▐Dūāē║Ų„Ż¼ė^£yŲ„čaāöŲ„×ķPIš{╣ØŲ„Ż¼┐╔ęįśŗįņ│÷ļŖäėÖCŽĄĮyųąĄ─┬Ī▓«Ė±ė^£yŲ„[9]Ż¼ė├üĒė^£yė└┤┼═¼▓ĮļŖäėÖCĄ─▐Dūė┤┼śO╬╗ų├ĪŻ╝┘įOļŖÖCśOī”öĄ×ķpŻ¼žō▌d▐DŠž×ķT1Ż¼ätŲõįŁ└Ē┐“łD╚ńłDl╦∙╩ŠĪŻ
łD1ųąŻ¼J×ķļŖäėÖC▐DäėæT┴┐Ż¼”ž1║═”╚1×ķ┬Ī▓«Ė±ė^£yŲ„ė^£yĄĮĄ─ļŖÖC▐DūėļŖĮŪ╦┘Č╚║═▐Dūė╬╗ų├ą┼ŽóŻ¼Ī„e╩Ūė^£yŲ„š`▓Ņvs1║═vc1Ęųäe╩Ūį┌ą²▐Dūāē║Ų„╝ż┤┼ą┼╠¢╠Äė┌****Ę∙ųĄĢrī”Ųõ▌ö│÷▓╔śėĄ├ĄĮĄ─š²ėÓŽęą┼╠¢Ż║
╩ĮųąŻ║uc×ķą²▐Dūāē║Ų„╝ż┤┼ą┼╠¢Ą─****Ę∙ųĄŻ╗k×ķą²▐Dūāē║Ų„Ą─ūā▒╚ĪŻ
ĮY║Ž┬Ī▓«Ė±ė^£yŲ„įŁ└Ē┐“łDŻ¼┐╔Ą├ĄĮė^£yŲ„čaāöš`▓Ņ×ķŻ║
į┌ļŖÖCśOī”öĄpĪóžō▌d▐DŠžš²Ą─Ū░╠ߎ┬Ż¼PMsMĄ─▀\äėĘĮ│╠╚ńŽ┬Ż║
Ė∙ō■╔Ž├µĄ─ĻPŽĄŻ¼Ą├ĄĮļŖÖCĄ─▐DūėĮŪ╝ė╦┘Č╚║¾,Įø▀^ā╔éĆĘeĘųŁh╣Ø╝┤┐╔½@Ą├ļŖÖCĄ─▐Dūė╬╗ų├”╚1Ż¼ė╔J/P║═ā╔éĆĘeĘųŁh╣Øśŗ│╔┴╦ļŖÖCĄ─╣└╦ŃöĄīW─Żą═Ż╗┴Ē═ŌŻ¼ė╔łDl┐╔ęį┐┤ĄĮŻ¼īó┬Ī▓«Ė±ė^£yŲ„ė^£yĄĮĄ─▐Dūė╬╗ų├ą┼Žó”╚1╚Īš²Žę║═ėÓŽę║¾Ż¼Ą├ĄĮ┴╦┼cą²▐Dūāē║Ų„š²ėÓŽęĘĄ╗žą┼╠¢ĮŌš{║¾ą╬╩ĮŽÓ═¼Ą─ą┼╠¢sin”╚1║═cos”╚1Ż¼╝┤╩Ūą²▐Dūāē║Ų„Ą─╣└╦ŃöĄīW─Żą═ĪŻė^£yŲ„š`
< |