����Visual C++��SVPWM�㷨�����c���F
�O�F�ɣ���F�ң��R���䣬 ��־��
�������I���I��W늚��ϵ�������������I1 50001��
ժҪ���齵��׃�l�{��ϵ�y�����㷨�����_�l�ɱ����ڷ���늉�խ�gʸ���}���{��( SVPWM)ԭ���Ļ��A�ϣ������һ�N����Visual C++�Ľ���׃�l�{��ԇ�ϵ�y��ԓϵ�yӲ�������PCI������DSP320F2812�\�ӿ��ƿ���������Visuai C++6 0�_�l�˽���׃�l�{�ٌ��r����ܛ������****�������ڿ����㷨������ͬ���ڔ�����̖̎����(DSP)��FlashоƬ�ϣ������ԓϵ�y���A�ϿɌ������㷨�M�ж����_�l���o횸����κ�Ӳ���·��ԇ��������B�ķ������У��_�l�Ŀ���ܛ��ݔcئ�������ã��_�����OӋҪ���Ќ���ԡ�
�P�I�~�����gʸ���}���{�ƣ�׃�l�{�٣�Visual C��
�Ї����̖��TM921. 5l�īI���R�a��A���¾�̖��1673-6540( 20091 11-0018-04
0 �� ��
Ŀǰ���ڽ�������늄әC�{�ٷ��棬�}���{��( PWM�����Ƽ��g�яV�������ڸ�����׃�l�{��ϵ�y�����п��gʸ���}���{��( SVPWM)���g���п��ƺ��Ρ�늉������ʸߡ�������λ�׃С���D���}�ӵ͵ȃ��c��1 2�����ڌ��H�еõ��ˏV�����á�
��׃�l�{��ϵ�y�У����N�����㷨���õ�������ơ����ˣ�����ڲ����ٴ��_�l׃�l�{��Ӳ��ϵ�y����r�¿��Ԍ������㷨�M�ж����_�l���Խ����_�l�ɱ������ЏV���đ��Ãrֵ��VisualC++����������Ŀ�ҕ�����̣�������ɏĵ�ܛ���������Ñ�ܛ���ȸ��N���ó�����_�l�����OӋ�������_�l늙C׃�l�{�ٵĿ���ܛ�������ƕrֻ��Ŀ��ƽ����x���{�Ʒ�ʽ���O��һЩ��Ҫ���������Ɍ��F׃�l�{�٣����܌��r�O�y���P��variable frequency speed regulation; Visual C~H�Σ�����Ҫ����������M�����㷨��ֻ�����_�l�h�������P�����M���ļ��Ɍ��F�����o�����Ӳ���·���Լ�������̻���������̖̎����( DSP)��FlashоƬ�ϣ��@ʹ늙C�����㷨�����_�l׃�ø����Ρ�
1 SVPWM�����㷨ԭ��
���ཻ���{��ϵ�y׃�l���·��D1��ʾ���D��VT1- VT6����׃��3����۵�6�������_�P�ܣ�ݔ��늉��Ɍ�������Ϲ����������_�P��B�Q����ÿһ��۵����ɂ��_�P����������̖���ǻ��a�ġ�������VT1���T�O������̖�r��VT4�T�O�o����̖���˕rVT1��ͨ��VT4�P�࣬UA=UDC����֮��VT4�T�O������̖��VT1�o����̖�r���˕rVT4��ͨ��VT1�P�࣬UA=0��
���Oÿ��������_�P������ͨ�r��1�����_�P������ͨ�r��0���t������۹���8�N�_�P��
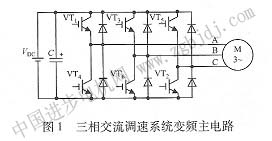
�B����O( 000����1(001)��2(010)��3(011)��4(100)��5��101����6(110)��7(111)�������0��B��7��B�������������_�P���������_�P����ͬ�r��ͨ�Ġ�B���������@�ɷN��B��ݔ����늉��;�늉�����0���Q֮�����B������6�N������B��8�N��B������8����ͬ�Ļ���늉�ʸ��������6������늉�ʸ����V1- V6���̓ɂ���늉�ʸ��(V0��V7)��������ӳ�䵽Park��ƽ���£��Ϳ��Եó�խ��늉�ʸ���D����D2��ʾ���D��6��������g늉�ʸ����ֵ��ȣ���λ���λ���60�ȣ��я�ƽ��ֳ�6���ȅ^(��D2��I����V����)��2����ʸ��V0��V7λ�ڈA�ġ�늉�SVPWM��Ŀ�ľ���ͨ�^����6�������_�P��8�N������B���ƽ�늙C��������Ҫ������r��늉�ʸ��Uout�Ķ��_���^�ߵĿ������ܡ�
�D2�o���������ȅ^I�r����r��Uout��ݔ���ą�����늉�ʸ�������ֵ������늉��ķ�ֵ�������D���ٶȞ�ݔ������늉��Ľ��l�ʡ�Uout����V1��V2���ԕr�g�M�ρ��ϳɣ�������T1��Tc����V1��T2��Tc����V2��ʸ���͡�����T1��T2�e��V1��V2���õĕr�g��Tc��Uout���õĕr�g��
�����@�N��ʽ������һ��T c���g����Ȼ��V 1�� |