�����в�����늙C��늉��]�h����
�������� ʷ���ƣ����ϿƼ���W���������471003��
ժҪ������늙C( USM1��һ�N������늙C���\�ЙC�����������ӡ����Ʒ�ʽ����ͬ�ڂ��y늴�늙C���������ϲ������ƫ��\�М�����ؓ�d׃�������ص�Ӱ����ʹ�ö����в�USM�Ķ�����늉���ֵ��^������늙C�������\�Зl����ֱ�ӌ���늙C�\�������½����D�ٲ��Ӵ�ᘌ��@һ���}���OӋ�����F�˻��ڔ����Ŵ�̎����( DSP)��USM����늉��]�h���ƣ�ʹ�ö���늉���ֵһ�²��ɿأ������늙C�\�еķ����ԣ���������չIUJSM�Ĺ��I�����÷�ͬ��
�P�I�~������늙C���]�h���ƣ�늉�����
�ЈD���̖��TM301.2��TM35�īI���R�a��A���¾�̖��1673-6540( 2009) 12-0014-03
0����
����늙C( USM)���É�늲��ϵ��扺�Ч�����F��ܵ��Cе�ܵ��D������ͨ�^�����D���g��Ħ�����Ì����ӵ�������D�����D�ӵĺ��^�η����\�ӣ��Ķ��@�ÙCе����ݔ����USM��ʽ���ӣ������в�USM��Ŀǰ���õ���Ҫ��͡��cUSM�������\�ЙC�����m�������ӿ��Ʒ�ʽ�c���y늴�늙C���@������Զ����в�USM�������鱣�C�������Ч�\�У�������늉���ͬ�l�ȷ������\���l�ʞ鳬�l��һ���20 - 100kHz����늉���ֵ�^��(���ֵһ���100 -1000V)�����H���õ�USM�����ڶ�������մɲ������Բ������ƫ��\�М�����ؓ�d׃�������ص�Ӱ푣�ʹ��������USM�Ķ�����늉���ֵ��@����������늙C�������\�Зl����ֱ��Ӱ�늙C�ķ����\�У��D�ٲ��Ӵ��ؕr���p���
�C�������늙C�ӑB�c���B���ܣ��pС�D�ٲ��ӣ�ʹ늙C������Ч�\�У���Ҫ��늙C�M��늉��]�h���ơ�
�����ڻ��ڔ�����̖̎����( DSP)�Ķ����в�USM�ӿ��ƌ��ƽ�_�ϣ��OӋ�����F�˶���늉��]�h���ƣ�ʹ�ö���늉���ֵһ�²��ɿأ������늙C�\�з����ԣ���������չUSM�Ĺ��I�����÷�ͬ��
1 늉��]�h���Ƶ��OӋ�c���F
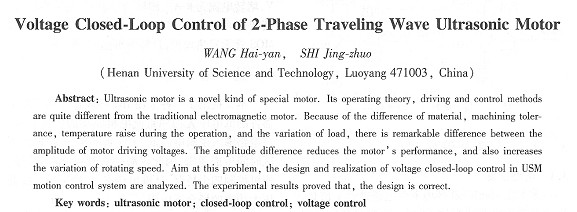
�Dl���_�h�\����r�µ�늙C������늉����y���Ρ��ɈD��Ҋ������늉����ֵ�քe��222 V��258 V��^��ԇ���늙C����aUSM60�Ͷ����в�USM���C���l�ʞ�41. 09 kHz�������·��5������늙C���ƌ���DSPоƬDSP56F801��������оƬ��H�����·�Y��DC 12 V��늡�
�錍�F늉��]�h���ƣ�������Ҫ�@ȡ늉�������̖�����ཻ����늉������։��������ɞ���m��ֵ�ĵ͉���ֵ��̖����ADC�D�Q�锵����̖������һ���ı���ϵ��������늉�����ֵ���f�o��������DSP56FSOI���õ�12λADCģ�K�Ѓɂ������IJɘӱ����·���Ɍ��F��������늉�������̖��ͬ�r�ɘӣ��Ա��C���Ɯʴ_�ԡ�
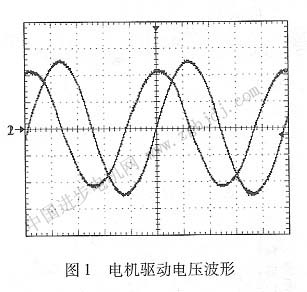
늉�������̖�ľ����c�ʴ_��ֱ��Ӱ��]�h����Ч��������USM��늉���ֵ���l���^�ߣ��·�е�늉�����ģ�M��̖���ɱ���غ��иɔ_������D2��ʾ������@Щ�ɔ_��̖���ɘӲ�����늉�����ֵ�����ڿ���������Ȼ���¿�����Ӌ���e�`���M��Ӱ��]�h���Ƶķ����ԡ���ˌ�늉�������̖����ȡ��Ҫ�ĞV����ʩ�����������H��̖���Δ����ļ��·����������OӋ�����c�L�Ӳɘ�ȡ���gֵ�Ĕ��֞V����������Ч�V���˷���������ֵ����D2��ʾ��
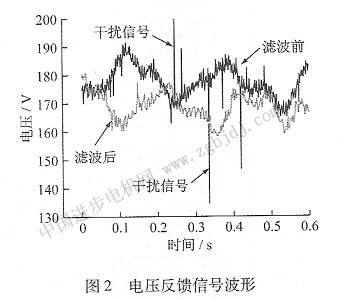
����늉�����ֵ�ք�����ÿ��늉����]�h����������D3�]�h���ƽY����D��ʾ������������늉��`��ֵ���o�����m�Ŀ�����ʹ���H늉�څ���ڽo��ֵ�����Ŀ����·���ö���H�����·�Y������DSP�l�����������}���{��( PWM)��̖�քe���ƶ���H���·��MOSFET��ͨ���B��ݔ�����ཻ����늉�����늉���ֵ�Ŀ��ƿ��Բ��ø�׃PWM��̖ռ�ձȵķ����팍�F�����Ľ�B��늉���������ݔ������������������PWM��̖ռ�ձȡ�
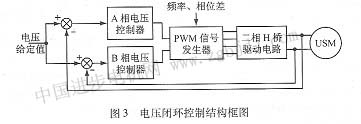
ͨ�^��늸�ƥ���·�ĺ����OӋ�����Ԝp��PWM��̖ռ�ձ��c��늉���ֵ֮�g�����Pϵ�ķǾ��ԣ�ʹ֮�ɞ���Ƶľ����Pϵ����ˣ�����늉��������]Ӌ��PI���������Ժ������ƽY�������푑��ٶȡ�����Ӌ���OӋ��ʽ(1)��ʾ������ʽPI�����㷨��  늉��]�h���Ƴ���������D4��ʾ�� 2ԇ�Y�������� |