�o(w��)ˢֱ��늄�(d��ng)�C(j��)�D(zhu��n)���}��(d��ng)�������·���
���Gϼ����l(f��)�����o(j��)־�ɣ����ϴ�W(xu��)�����K�o(w��)�a214122��
ժҪ���o(w��)ˢֱ��늄�(d��ng)�C(j��)���е��D(zhu��n)���}��(d��ng)�������䑪(y��ng)�÷�����ͨ�^(gu��)������ˢֱ��늄�(d��ng)�C(j��)�ēQ���^(gu��)�̣����÷ǓQ���������׃����ԓ���������Q���^(gu��)���зǓQ�������㶨���Ķ���Ч�����D(zhu��n)���}��(d��ng)������Simulink��PI.FCS��(du��)ϵ�y(t��ng)�ķ��棬�(y��n)�C��ԓ��������Ч�ԺͿ����ԡ�
�P(gu��n)�I�~���o(w��)ˢֱ��늄�(d��ng)�C(j��)���D(zhu��n)���}��(d��ng)��PLECS
�ЈD���̖(h��o)��TM33 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004 -7018( 2008) 09 -0001 -03
O�� ��
���şo(w��)ˢ늄�(d��ng)�C(j��)���S�������Ӽ��g(sh��)�İl(f��)չ�����F(xi��n)��һ�N����늙C(j��)��������푑�(y��ng)���١�Ч�ʸߡ������ܶȷ��{(di��o)�����ܺõ�һϵ�Ѓ�(y��u)�c(di��n)���F(xi��n)���яV����(y��ng)���ڸ��N�{(di��o)�و�(ch��ng)����1����������е��D(zhu��n)���}��(d��ng)ȱ�c(di��n)�����������ڸ߾����ٶȡ�λ�ÿ���ϵ�y(t��ng)�еđ�(y��ng)�á�
����o(w��)ˢ늄�(d��ng)�C(j��)�D(zhu��n)���}��(d��ng)��ԭ�������N��2-4��.�X���D(zhu��n)���}��(d��ng)��������뷴늄�(sh��)������D(zhu��n)���}��(d��ng)�Լ��Q���D(zhu��n)���}��(d��ng)������ǰ�ɷN�D(zhu��n)���}��(d��ng)��Ҫ���c늙C(j��)�����칤ˇ���D(zhu��n)�Ӵ�䓳�Ų��������P(gu��n)������ͨ�^(gu��)��(du��)늙C(j��)���w����������ơ��Q���D(zhu��n)���}��(d��ng)��Ҫ���ړQ���^(gu��)����������׃����120�Ȍ�(d��o)ͨ��ʽ������Ƿ������_(k��i)ͨ����������Ӻ��P(gu��n)����������½���ͬ��������ĸ��������Ǻ㶨ֵ���@�������D(zhu��n)�صIJ��ȣ����a(ch��n)���D(zhu��n)���}��(d��ng)����(du��)�ړQ���D(zhu��n)���}��(d��ng)�F(xi��n)�ڇ�(gu��)��(n��i)�������S���о�������5-7���������īI(xi��n)[5]���ᵽ��������h(hu��n)���ƣ�ͨ�^(gu��)�����_(k��i)ͨ������������ٶȣ�ʹ����P(gu��n)���������½��ٶ�һ�£��Ķ������D(zhu��n)���}��(d��ng)���@�N��ʽ��Ҫ�m����늙C(j��)�����\(y��n)���A�Ρ��īI(xi��n)[6]�в�������A(y��)�y(c��)��������(j��)����(g��)�ٶȶε�늙C(j��)�Q�����r���քe��(du��)��ͬ���ٶȶ��M(j��n)�в�ͬ�Ŀ��ơ��īI(xi��n)[7]�нo����늙C(j��)�ڸ��م^(q��)��pС�Q���D(zhu��n)���}��(d��ng)�Ŀ���Ҏ(gu��)�t�����ßo(w��)���Ŀ��Ʒ���ȡ�����^�õĿ���Ч����������õķ������|(zh��)�Ϟ��_(k��i)�h(hu��n)�a(b��)�����a(b��)����ʩ�m��(y��ng)�Բ�ڌ�(sh��)�H��(y��ng)���в���һ����ȡ���^�õ�Ч����
�������o(w��)ˢֱ��늄�(d��ng)�C(j��)���D(zhu��n)���}��(d��ng)��(w��n)�}������������÷ǓQ������㶨��������(j��)���ַǓQ�������㶨��֭����Q���^(gu��)�����_(k��i)ͨ��Ŀ��ƃɔ�(sh��)��ʹ�ړQ���^(gu��)���б����_(k��i)ͨ������������P(gu��n)��������½��ٶ���ͬ�����Q�����֮�͵��ڷǓQ����������C�ǓQ�������ȡ������ڸ���߀�ǵ����A�Σ�ֻҪ���ƺ���(sh��)Ӌ(j��)�����_�����܉��C�ǓQ������㶨����Ч���ƓQ���D(zhu��n)���}��(d��ng)��
1�o(w��)ˢֱ��늄�(d��ng)�C(j��)�Q���D(zhu��n)���}��(d��ng)����
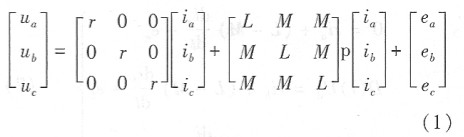
���O(sh��)��(1)�����@�M��ȫ��(du��)�Q����϶�ň�(ch��ng)�鷽��������������D(zhu��n)�Ӵň�(ch��ng)�ֲ��Ԍ�(du��)�Q��(2)�����X�ۡ��Q���^(gu��)�̺�늘з���(y��ng)��Ӱ푣�(3)늘��@�M�ڶ��Ӄ�(n��i)��������B�m(x��)�ֲ���(4)��·��ͣ���Ӌ(j��)�u���ʹŜ��p�ġ��t�o(w��)ˢֱ��늄�(d��ng)�C(j��)�Ĕ�(sh��)�W(xu��)ģ��������8����
ʽ�У�ua��ub��uc�քe��A��B��C�����늉���ia��ib��ic�������@�M�����ea��eb��ec�����෴늄�(sh��)��r��늙C(j��)�@�M��裻L��늙C(j��)���@�M늸У�M��늙C(j��)���g���У�p�������ӡ���(du��)���D(zhu��n)�Ӵň�(ch��ng)�ӽ������ğo(w��)ˢ늄�(d��ng)�C(j��)��늙C(j��)�@�M�еķ�늄�(sh��)�����β���
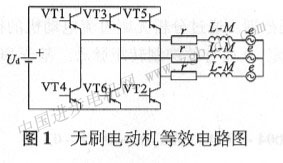
����(j��)�o(w��)ˢֱ��늄�(d��ng)�C(j��)��늉����̣��ɵ�늙C(j��)�ĵ�Ч�·����Dl��ʾ��
�����o(w��)ˢֱ��늄�(d��ng)�C(j��)��˲�r(sh��)�D(zhu��n)�ر��_(d��)ʽ�飺
ʽ�У�����늙C(j��)���ٶȡ�
��ʽ(2)���Կ�������������o(w��)ˢ늄�(d��ng)�C(j��)ݔ��鷽����������ܱ��C늙C(j��)ݔ���D(zhu��n)�غ㶨���������ڟo(w��)ˢֱ��늄�(d��ng)�C(j��)�@�M늸еĴ��ڣ����׃������������������ķ���������ʕ�(hu��)�a(ch��n)���Q���D(zhu��n)���}��(d��ng)��
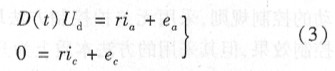
�������Ϙ�Q�����������Q���^(gu��)���D(zhu��n)���}��(d��ng)����(d��ng)��(d��o)ͨ����AC�Q��BC�r(sh��)��늙C(j��)�Q��ǰ�\(y��n)�з�(w��n)����B(t��i)����AC������㶨��B��������㣬�Q��ǰ���̞飺
ʽ�У�D(t)���Ϙ��_(k��i)�P(gu��n)�ܿ�����̖(h��o)ռ�ձȣ�U d�� |