���ڻ�ģ׃�Y(ji��)��(g��u)�Į���늙C(j��)ʸ�����Ƽ���(sh��)�F(xi��n)
��x�L1��犂���2���S��1
(1.���϶��̌W(xu��)Ժ��(y��ng)�ü��g(sh��)�W(xu��)Ժ��������̶4111O1��
2.�Ї���W(xu��)������̖(h��o)�c�D��̎����������c(di��n)��(sh��)�(y��n)�ң����300300)
ժҪ���_��(d��ng)��ؓ(f��)�d�ļ��댦(du��)����늙C(j��)ʸ������ϵ�y(t��ng)��(hu��)��(y��n)��Ӱ푣�ʹϵ�y(t��ng)����׃������һ�N�µķ�������B�˻��ڻ�ģ׃�Y(ji��)��(g��u)�Į���늙C(j��)ʸ�����ƣ���(du��)��ģ׃�Y(ji��)��(g��u)����������M(j��n)�����O(sh��)Ӌ(j��)���xȡ���m�Ŀ��ƅ���(sh��)���I�(y��n)�c����Y(ji��)��������ģ׃�Y(ji��)��(g��u)���ƵĮ���늙C(j��)ʸ������ϵ�y(t��ng)��(d��ng)�o�B(t��i)�������ã������^��(qi��ng)����������
�P(gu��n)�I�~������늙C(j��)��ʸ�����ƣ���ģ׃�Y(ji��)��(g��u)����
�ЈD���̖(h��o)��TM343 �īI(xi��n)��(bi��o)�R(sh��)�a��A
1 ����
��������늙C(j��)�^ֱ��늙C(j��)���ԣ����нY(ji��)��(g��u)���Σ�ݔ���D(zhu��n)�ش�����c(di��n)�����ǣ�����늙C(j��)ͬ�r(sh��)����һ��(g��)��׃������(qi��ng)��ϡ��Ǿ��Եĸ��A�r(sh��)׃ϵ�y(t��ng)[1]������yֱ��ͨ�^�ⲿ��̖(h��o)���(zh��n)�_������늴��D(zhu��n)�أ��@��Ҳ�ͺ��y�m���ڿ��ƾ���Ҫ��ߵĹ��I(y��)���ϡ�1971���Bladchke F�����ʸ��������Փ��ͨ�^����(bi��o)׃�Q������늙C(j��)ģ�͵�Ч��һ�_(t��i)ֱ��늙C(j��)���������،�(du��)����늙C(j��)��(sh��)ʩ����[2]�����y(t��ng)PID���Ʒ�������ʹ�ŷ�ϵ�y(t��ng)�@��һ���Ŀ��ƾ��ȣ���ϵ�y(t��ng)���������ܲ���[3]�����������ģ׃�Y(ji��)��(g��u)���Ʒ�����(du��)ϵ�y(t��ng)����(sh��)׃�����ⲿ�ɔ_�������õ������ԣ���(d��ng)�B(t��i)푑�(y��ng)�죬���������O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)������ͨ�^��ģ׃�Y(ji��)��(g��u)���������O(sh��)Ӌ(j��)��(sh��)�F(xi��n)�ˮ���늙C(j��)��(w��n)������(zh��n)�_�����ٵ��{(di��o)�١�
2 ����늙C(j��)����ģ���c��ģ׃�Y(ji��)��(g��u)ԭ��
2.1��ģ׃�Y(ji��)��(g��u)ԭ��
��ģ׃�Y(ji��)��(g��u)����SMVSC)[��׃�Y(ji��)��(g��u)���Ƶ�һ�N���Ʒ��������Ŀ���ԭ���Ǯ�(d��ng)ϵ�y(t��ng)��B(t��i)��Խ��B(t��i)���g�IJ��B�m(x��)����(��ƽ�桢�_�P(gu��n)ƽ��)�r(sh��)���������ƵĽY(ji��)��(g��u)�Ͱl(f��)��׃������ʹϵ�y(t��ng)��һ���������ؠ�B(t��i)܉�E��С���ȡ����l�ʵ��\(y��n)��(d��ng)����ʹϵ�y(t��ng)�_(d��)������������ָ��(bi��o)�����Ү�(d��ng)ϵ�y(t��ng)�M(j��n)�뻬ģ�\(y��n)��(d��ng)�r(sh��)��ϵ�y(t��ng)����(sh��)��׃�������_��(d��ng)��(du��)��ģ�\(y��n)��(d��ng)���]��Ӱ푣����ϵ�y(t��ng)�;������õ����m��(y��ng)���c�����ԡ�
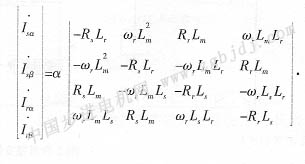
2.2����늙C(j��)ģ��
�ڶ����oֹ��������(bi��o)ϵ�£�����늙C(j��)��늉�һ���ģ�͵Ġ�B(t��i)����[5]�����飺

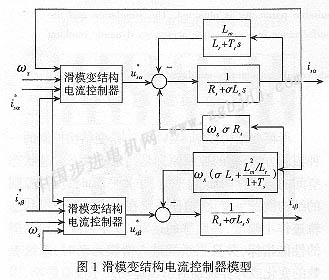
3 ��ģ׃�Y(ji��)��(g��u)���������O(sh��)Ӌ(j��)
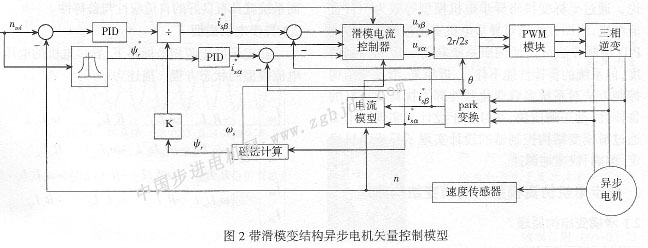
����ģ׃�Y(ji��)��(g��u)�Ŀ��ƣ����P(gu��n)�I���ڿ��������O(sh��)Ӌ(j��)�����IJ��û�ģ׃�Y(ji��)��(g��u)�������������Y(ji��)��(g��u)��D1��ʾ������ģ׃�Y(ji��)��(g��u)����늙C(j��)ʸ������ģ����D2��ʾ��
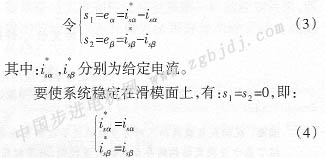
��(du��)�ڻ�ģ׃�Y(ji��)��(g��u)���������O(sh��)Ӌ(j��)�������ɂ�(g��)���֣�һ���O(sh��)Ӌ(j��)��ģ�棬ʹ�û�ģ��s=O�������O(sh��)Ӌ(j��)����(d��ng)ģ�B(t��i)�����ʣ��Ա��C��ģ��������\(y��n)��(d��ng)�c(di��n)���������^�̵ĕr(sh��)�g��(n��i)��ƿ�ص���ģ���ϣ�
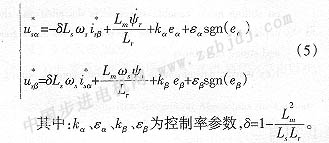
3.1 ��ģ��s���O(sh��)Ӌ(j��)
3.2����(d��ng)ģ�B(t��i)�����ʵ��O(sh��)Ӌ(j��)
��������׃�Y(ji��)��(g��u)���ƽoϵ�y(t��ng)�����Ķ���(d��ng)������xȡ���m�����泣��(sh��)[5]���ڱ����У����˵õ�ǡ��(d��ng)?sh��)�����?sh��)ֵ��������ָ��(sh��)څ���ɣ�s=��sgn(s)+ks���_�����泣��(sh��)��ͨ�^��(du��)�����ʅ���(sh��)�ź�k���{(di��o)����ʹϵ�y(t��ng)�܉�M���ܵĿ��ٵ��_(d��)��ģ�棬�Ķ����Cϵ�y(t��ng)�ķ�(w��n)�����c��(d��ng)�B(t��i)Ʒ�|(zh��)��
���-������(bi��o)�S�®���늙C(j��)�Ľo��늉��M�㣺
���������Z��(w��n)������Փ֪�R(sh��)���˕r(sh��)��ԓϵ�y(t��ng)���������Z��(sh��)�飺

��ϵ�y(t��ng)���Է��ػ�ģ�棬��ô�������Z��(sh��)�Č�(d��o)��(sh��)�M���<0������

| 


