����IGA��USM�ٶ����ܿ���ϵ�y�о�
�̾S��
(�����ЏV���ҕ��W�����K����213001)
ժҪ��ᘌ�����늙C�����ĕr׃�ԡ�ϵ�y���ڵķǾ��Ժ�ϵ�y�ď������Ե����c��������������z���㷨�ij���늙Cģ���W�j�ٶȿ��Ʋ��ԣ����Y���������c���yģ���W�j�ٶȿ�����ȣ�����ԓ������ϵ�y���^�õ،��F�O���ij���늙C�ٶȅ���ģ�͵����m����ۙ��푑��ٶ��}��С�����п����`��m���ԏ������ƾ��ȸߡ��������ݏ��ȃ��c��
�P�I�~�������z���㷨������늙C��ģ���W�j���ٶȿ���
�ЈD���̖��TP273 �īI���R�a��A
1 ����
����늙C(USM)�ǽ���ʮ��lչ������һ�Nȫ��ԭ�����Y��������늙C�������É���մɲ���PZT��߷���PVDF��Ĥ���ϵ��扺�Ч����������D�Q�鶨�ӏ����w�ڳ���ȵ���ӣ���ͨ�^�����c�D�ӽ���֮�g��Ħ����������D�Q���D�ӵ���ӡ��c���y��늴�늙C��ȣ�����늙C���нY���o�����Ρ������ܶȴ��١���Ť�ء���С���ƄӺ�푑����Ժ��Լ���늴Ÿɔ_�������ȃ��c�������ѽ��ڃx���x��������������C���ˡ��k���Ԅӻ������պ�����I��õ���Խ��Խ�V���đ��á������������е�푑��졢������i�����cʹ��ɞ�һ�N�^������ŷ���������Ȼ������usM�����ĸ߶ȷǾ��Ժ������Եĕr׃�ԡ�������Եȣ������ֹ���Л]�о��_�Ĕ��Wģ�ͣ�������y�Â��y����Փ�Ϳ��Ʒ����팍�F�߾��ȵij���늙C���ŷ����ơ���ˣ������������S���W�ߺͿƼ��ˆTᘌ�����늙C���ӆ��}���M���˴����о���ԇ��ȡ���˲����о��ɹ�����ģ��������Փ��PID������Փ���W�j�ȑ��õ�USM�ă������ƣ��_����һ���Ŀ���Ч��������������늙C�Դ������^��IJ��ӣ�����ʹϵ�y�@�þ��_�ĸ�ۙ푑������õĿ������ܡ�
�b����������������������������z���㷨�ij���늙Cģ���W�j�ٶȿ����·����������˼·�ǣ����������z���㷨�ھ�����ģ���W�j���������������������OӋ�õĿ��������ڽ�������늙C���ٶ����m������ϵ�yģ�͡�ԇ�Y������������ԓϵ�y�ڌ�usM�M���ٶȿ��ƕr�����кܺõ��D�ٸ�ۙ푑��������^�����m���ԡ������ԣ����ƾ��ȸߣ����Ҍ��S�C�_�Ӿ��к��������ԡ�
2 ����늙C���ٶ����ܿ���ϵ�y
�D1��ʾ�o���˳���늙Cģ�ͅ������m���]�h�ٶȿ���ϵ�y�Y�����ٶȅ���ģ���ǿ���ϵ�y�ĸ�ۙĿ�ˣ������Ǻ㶨�D�٣�Ҳ�������A�S�D�ٵȡ������늙C�ٶȸ�ۙ�Ŀ����c�ʴ_�ԣ���ϵ�y�ٶȿ��ƃȭh�����붨����әz�y��̖��ģ��
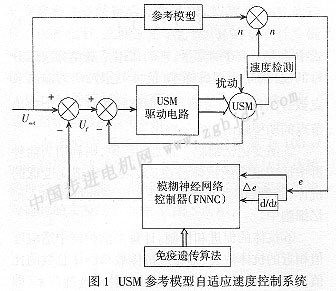
�W�j������(FNNC)�ǿ��Ƴ���늙C�ٶȵģ���ݔ�˞��D���`��e����׃����e��e���Ʌ���ģ���cUSM�D�ٙz�y��Ԫ��������̖����^��ã��� FNNC����ͨ�^�����z���㷨�ھ��@�ã���KĿ����ʹ����늙C���H�D���܉��ۙ����ģ��ݔ������e��O�� FNNC����ͨ�^�����z���㷨�ھ��@�ã���KĿ����ʹ����늙C���H�D���܉��ۙ����ģ��ݔ������e��O��
3 ģ���W�j������(FNNc)
������ϵ�y��ģ���W�j�������Y����D2��ʾ�������Č�ǰ���W�j���ɣ��քe��ݔ�ˌ�(i��)���`�ٺ�����(i��)��Ҏ�t��(k��)��ݔ����(o��)[2]
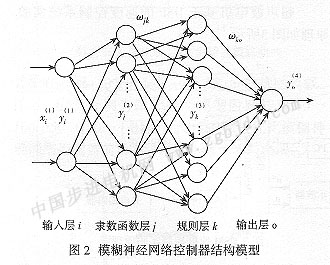
��һ����ݔ��ӣ�����ݔ����̖e����׃����eͨ�^���cݔ�뵽��һ�ӡ�ݔ���ݔ�����Pϵ���Ա�ʾ�飺


�ڶ������`�ٺ����ӣ�ԓ�ӵ�ÿһ�����c����һ���Z��׃����������Ӌ���ݔ��׃������ij���Z��ģ�����ϵ��`�ٺ�������������ݔ���������Ӳ��ø�˹���������`�ٺ������ڵ�j�����c�У�
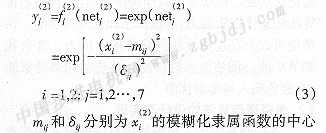
ֵ�ͷֲ����ȣ����@����˹�`�ٔ��ľ�ֵ�͘˜ʲ
|



