����ģ�����m��(y��ng)��ģ׃�Y(ji��)��(g��u)��ֱ��늄әC(j��)λ�ÿ���
��-�\1������2��ꐼ��t2����С��2
��1�����ƌW(xu��)���g(sh��)��W(xu��)��������ɳ410073��2�A�пƼ���W(xu��)��������h430074��
ժҪ���������ڔ_�ĽǶȳ��l(f��)���O(sh��)Ӌ(j��)��ģ�����m��(y��ng)��ģλ�ÿ����������Ҟ��˸��õ����Ƹɔ_��߀�O(sh��)Ӌ(j��)һ��(g��)�����_���^�y����ͨ�^����͌�(sh��)�(y��n)�ĽY(ji��)��������ԓ���Ʋ��Ԍ������ϵ�y(t��ng)�Ŀ��ɔ_������ۙ���������@�����á�
�P(gu��n)�I�~��ֱ��늄әC(j��)����ģ׃�Y(ji��)��(g��u)��ģ�����m��(y��ng)����
�ЈD���̖��TM359.4 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004 -7018( 2008) 09 -0035 -03
O����
����ֱ��늄әC(j��)��ֱ���(q��)��Խ��Խ��سɹ���(y��ng)���ڙC(j��)������ͨ�\(y��n)ݔ������܊���ȱ����I(l��ng)�������y(t��ng)�ĝL��ӽz�U����ʽ������?y��n)麆���˂����^�̵đT�����g�h(hu��n)��(ji��)����˾߂���ߵļ��ٶȺ��ٶȣ�������ʹֱ���\(y��n)�ӵęC(j��)��(g��u)׃�ø����Ρ���Ҳ���ڲ��㣬���D(zhu��n)��չ�_�a(ch��n)���˶˲�Ч��(y��ng)���X��Ч��(y��ng)��������C�������^���D(zhu��n)늙C(j��)�����@���@Щ��Ӵε�ԭ�����īI(xi��n)[1��3]�ж���Ԕ��(x��)�ط�������?y��n)������Ĕ_������ʹ��ֱ��늄әC(j��)�ڿ������y�ȼӴ����������������Ĕ_�ӣ��ͳɞ�Ŀǰֱ��늄әC(j��)�о��I(l��ng)���һ��(g��)���c(di��n)���y�c(di��n)���������Ǐ��@��(g��)�Ƕȳ��l(f��)���M(j��n)��ˮ��ͬ��ֱ��늄әC(j��)λ�ÿ��Ƶ��о���
1ֱ��늄әC(j��)ʸ�����Ʒ���
��Dl��ʾ��ֱ��늄әC(j��)���Կ��������D(zhu��n)늙C(j��)��չ�_��ʽ����˽���������������D(zhu��n)늙C(j��)�ķ�����������늙C(j��)���D(zhu��n)�ӺͶ��������S���M(j��n)�зֽ⣬��(j��ng)�^�������d�S����������㣬�tֱ��늄әC(j��)������ֻ�cq�S������������ȣ��@�ӾͿ��������ֱ��늙C(j��)�ǘӣ�ͨ�^��������Ĵ�С����׃늙C(j��)�D(zhu��n)�١�
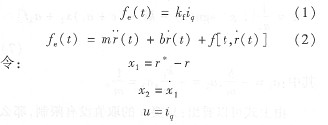
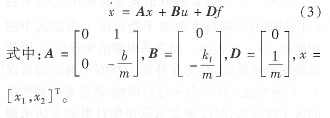
���У�m��b��Kf���քe��ֱ��늄әC(j��)�����|(zh��)��������ϵ��(sh��)��������(sh��)��ȡֵ�քe��35 kg��0.0l N��s/m��540N��A,fe(t)��늙C(j��)������r(t)��늙C(j��)λ�ƣ���f��[t,r(t)]�������_�ӡ����ɠ�B(t��i)���̣�
2ֱ��늄әC(j��)��ģ׃�Y(ji��)��(g��u)���Ʒ���
2.1��ģ׃�Y(ji��)��(g��u)�Ļ���˼��
��ģ׃�Y(ji��)��(g��u)�Ŀ��Ʒ��������J(r��n)���ҵ��@��һ��(g��)��ģ�ГQ��ĺ���(sh��)s(x)��������u(x)��ʹ��(d��ng)�\(y��n)���c(di��n)���_(d��)�ГQ��s(x) =0�����r(sh��)��Ȼ�У�
�䱾�|(zh��)���ǻ����������Z��(w��n)���ԡ���?y��n)�?/DIV>
�tv�Č�(d��o)��(sh��)��Ȼ��ؓ(f��)�붨�ģ����ϵ�y(t��ng)�������Z��(w��n)���������@�N����ģ�B(t��i)���Ʒ����cϵ�y(t��ng)�ą���(sh��)���_�ӟo�P(gu��n)�����̎�ڻ�ģ�\(y��n)�ӵ�ϵ�y(t��ng)�;��кܺõ������ԡ��P(gu��n)�ڻ�ģ׃�Y(ji��)��(g��u)���ƵĻ���˼�뼰���P(gu��n)��Փ���C�����ԅ����īI(xi��n)[6��7]��
2.2ֱ��늄әC(j��)λ�ÿ��ƻ�ģ���Ʒ���
ȡ��ģ����
���ոߞ�������ָ��(sh��)څ���ɣ�
�@�����������ƻ�ģ���ГQ�r(sh��)�Ķ��ӡ�
���x�������Z��(sh��)Lyapunov���£�
�t��Lyapunov��(w��n)���Զ�����֪����(d��ng)v
�@Ȼv<0���ʻ���څ���ɵĻ�ģ�������Ƿ�(w��n)���ġ�
��ʽ(6)����ʽ(3)���t����ÿ����ɣ�
����ʽ���Կ�����ֻҪL��ȡֵ�]�����ƣ���ô�_�ӣ��o |