���ڷǾ�����������^�y���Ľ���늄әCֱ���D�ؿ���
���^�£�Ԭ�������P�ݴ�W�����K�P��225009��
ժҪ��������ֱ���D�ؿ���ϵ�y���P�I֮һ�Ǵ�朵Ĝʴ_�^�y���Y��һ�N�m�Ͻ���늄әCֱ���D�ؿ��ƵķǾ������������a�����Ӵ���^�y����ԓ�^�y���Ĵ_����机ͷ�늄������ĽǶȳ��l�����C��늙C�ڌ��\�з������Ӵ���^�y�Ĝʴ_�ԣ�����͌�������ԓ�^�y�����ڌ��ٶȷ����Ⱦ��_�ع���늙C���Ӵ�朣����F�Б�늙Cֱ���D�ؿ���ϵ�y�ĸ����ܿ��ơ�
�P�I�~������늄әC��ֱ���D�ؿ��ƣ��Ǿ�����������^�y��
�ЈD���̖��TM346 �īI���R�a��A ���¾�̖��1004 -7018( 2008) 09 -0046 -03
0�� ��
����늄әCֱ���D�ؿ���( DTC)��һ�N늙C��朡��D�ص�ֱ�ӿ��Ʒ�ʽ���ܷ��Ӵ�朵ķ�ֵ����λ�ʴ_�^�y��ֱ��Ӱ�ֱ���D�ؿ���Ч����늙C�\�����ܡ�
Ŀǰ�����Ӵ���^�y���������N����ֱ��Ӌ�㷨��1-2����ԓ�������Ρ��ӑB푑��죬����ه늙C�����^�࣬�һ����_�h���o�a����������Ӌ��Y���S늙C�\�й��r׃�������ʴ_���ڻ��ڸ��N�^�y���ķ�����3-5������Ӌϵ�y��B�r����ʹϵ�yȫ�ַ������ڲ�ͬ���\���ٶȷ����^�y��횲�ȡ��ͬ�����ꇡ�ԓ������늙C����Ӱ푺ܴ���Ҫ�~���O���ھ���B�^�y���팍�r��Ӌ늙C��������ʹϵ�y�Y�����s���ۻ��ڷ�늄ݷe�ַ�����6-7�����@�N�����H��ه늙C������腢�������F�dz����Σ����ǵ������ܲ��á�����^�y�����OӋԭ�t�DZM�����û���늙C���텢���������B�^�y�S�\�Р�B׃�������ˣ��īI[8]������N���ڷ�늄ݷe�ֵĴ���^�y�����M��������һ�N�����ڌ��H�\������Ȼ���д��ֱ��ƫ�ƻ���Ť���Ȇ��}���ڶ��N������eע�����ֵ���O�ã��҃H�����ں��ͨ���ƣ������N�����]�п��]ֱ���D�ؿ����·�늄��Ƿ��B�m��׃��̖�@�����H��r����˲����m��DTC�\�У������^�y����߀����PI�{�����ͷǾ����ģ�K���������{ԇ�y�ȡ��Б�늄әCֱ���D�ؿ����������������c�������ӿ��g늉�ʸ�������B�m����һ�N�xɢ��̖�����䶨��������@�M늸д��ڶ�����ͻ׃��������艺��Ҳ����ͻ׃�����䷴늄�Ҳ����B�m���xɢ��̖��ᘌ��@�N���c�����ĽY����һ�N���͵��m�ϸБ�늄әCֱ���D�ؿ����\�еķǾ������������a������^�y����ͨ�^�z�y��늄ݺʹ�朵������̶ȁ������a���̶ȣ��M���Q������朵ķ���ֵ��ԓ�^�y���㷨����PI�{�����o���ģ�K���{��Ѹ�٣����ڌ��F�����m�Ϻ��ͨ�������h�С�����\����C���@�N���ʹ���^�y�������_�Ժ͌����ԡ�
1���y��늄ݷe����������M�㷨
���Ӵ�朵Ă��y��늄ݷe���㷨�ǣ�
���У�us��is�քe�鶨��늉�ʸ�������ʸ������늄ݷe���㷨Ӌ�㺆�Ρ�푑��죬�H��ه늙C�������****��������ȱ�c�dz����@�����y�����͜y���`����һ���r�g�ȵķe�ֱ��F��㶨ֱ������������Ư�ƣ���ʹ���Ӵ��ʸ����s���\��܉�E��������ԭ�c�����ĵ�һ���A���˕r늙C��������к���ֱ��������Ӱ�늙C�����\�С����⣬��ʼ���ʸ���O�Üʴ_�c��ҲӰ푴���^�y�ʴ_�ԡ�
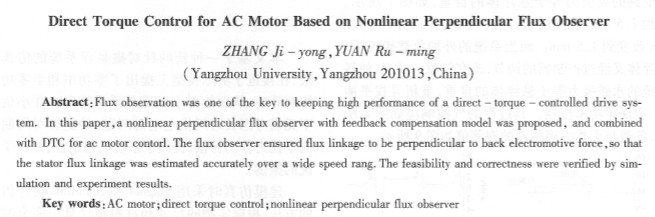
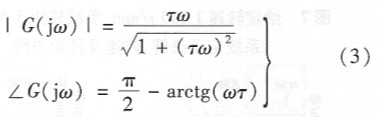
�������e���������ֱ��Ư��******��������ʽ(1)Ӌ����Ħ�s��ͨ�^һ����ͨ����׃���s 0����D1��ʾ��  �D�У�es��z�y���ķ�늄ݣ�us- Ris�������D1�еķe�֭h����ͨ�h���ϲ����õ�һ����ͨ�h������D2��ʾ���D2��������늄ݽ��^һ�A��ͨ�V����Ҳ���Եõ���朵��^�yֵ��
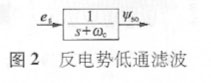
ʽ�Ц�c���ֹ�l�ʣ���c =1/�Ӟ�r�g��������ֵ�xȡ�����Ӵ��Ư�Ʒ�����˥�p�ٶ�Ӱ푺ܴ�ֵԽ��ֱ������˥�pԽ�����Ҍ����Ӵ�朵Ļ�����ֵ˥�p������Ӱ�Ҳ�ܴ�
��ͨ�V�����ķ��l푑��飺
���Կ����������Ӵ�朵��l�ʺܸߕr����̖�ķ�ֵ˥�p�����ƾ���С��ϵ�y |