һ�N���Ό��l�����೬�۲�늄әC��ϵ�y
��Ρ�������������(�Ϻ���ͨ��W���Ϻ�200240)
ժҪ�����y�ij���늄әC��������׃�����Ĵ��ڣ���ϵ�yͨ���Բ��Bһ�N���Ρ����l���������ܳ���ϵ�y��ԓϵ�yʹ�Ô����i�༼�g���F���࣬ͨ�^�������\�Ō���̖�Ŵ��ֵ150 V���܉�ܺõ��ӳ���늄әC��
�P�I�~������늄әC�������i��h�������·
�ЈD���̖��TM35 �īI���R�a��A ���¾�̖��1004 -7018( 2008) 09 - 0049 -03
O�� ��
����늄әC���É�늲��ϵ��扺����Լ��l늙C���ӵęCе��ӣ�ͨ�^���D��֮�g��Ħ������������D�Q��Cе��ݔ�������D�ӵĶ����\�� [1]���c���y늙C��ȣ��������w�eС�����ٴ��D�ء������ٶȿ졢���ܴň�Ӱ푡��������ش�ȃ��c��������ɞ�����늙C������о����c��
��������늄әC���\�әC����������늄әC���Դ�б��^�����Ҫ��һ��Ҫ�����Դ�܉�ݔ���l����20 -200 kHz�ĸ��l늉����������ډ�늲��Ͼ�������ؓ�d�����c����ͬ�ڂ��y늙C�ĸ��Ի�����ؓ�d������������ԴЧ�ʣ����F�����ĸ�Ч�D�Q��ʹ�Q�����@�����Ĺ��ʣ������Դ�͓Q����֮�g�������ƥ���·����ˣ����Դ��������һ���̶��ϛQ���˳���늄әC�����ܡ�
Ŀǰ���õ����·�������_�P���g������׃���·���F늉��������������f���迹ƥ����Դ���x�������@�N����������ͨ���Բ��ȱ�c���ӳ���늄әC��Ҫһ���^�ߵĹ���늉���ͨ����ͨ�^������׃�����c����늄әC�M���迹��팍�F��������׃�����ͳ���늄әC�����迹����һ���V���·��ÿһ�_����늄әC����Ҫһ���ض�������׃�����M���迹ƥ�䡣
����OӋ�����ܡ�ͨ�õ����·��ʹ֮������N��͵ij���늄әC���ӣ����ڴ˻��A���о�һ�N��֮��Ч�Ĝy�������Ƽ��g�����F����늄әC�ʴ_�������Ĺ��������кܴ�ĬF�����x[2]��
1���·�M��
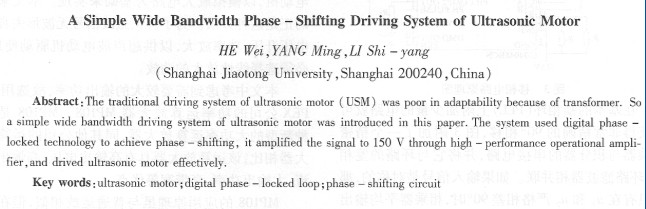
�ɳ���늄әC�Ĺ����C����֪���ֳ���늄әC���\����Ҫ���P���ӿ����·�ṩ��·�l����ͬ����λ���90�ȣ��l�ʞ�20 - 200 kHz��ݔ����̖���ֵ��100 - 350 V�����ʞ��ʮ�ߵĽ�׃��̖��
���ĵij���늄әC�Ӽ������·��Ҫ�������������ֽM�ɣ���̖�l������90�������·����̖���ʷŴ��·����D1��ʾ��
���·քe���������ַքe�M�н�B��
1 1������Ԫ
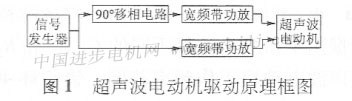
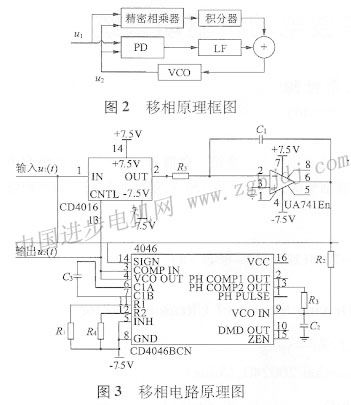
���ڳ���늄әC�����Ϳ��Կ���һ����ݣ����ОV�����ã�����ֻ��Ҫ��·���90�ȵķ�����̖���ɝM��Ҫ���IJ��Ô����i�༼�g���F90�����ࡣԭ����D��D2��ʾ���·�D��D3��ʾ��
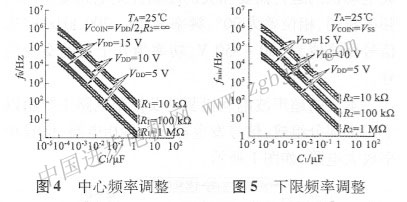
�ڻ������i��h( PLL)�ϸ����������·�Ϳ��ԫ@�÷dz����_��90�����ƣ��D3������һ������������c�e�����Ĵ����·���������c�h·���b�������h·�V�����ಢ�����ݔ����̖�nj��Q�ģ���ôֻ����u1��u2�������90�ȕr�������ƽ��ݔ��늉��Ş��㣬�����·������PLL�]��Ӱ푡�ֻҪu1��u2���LJ������90�ȣ������ݔ���к���ֱ���ɷ֣��e������ֱ����̖�������o���@�r�����·��ݔ���ͳɞ鉺����ʎ��(vco)����늉�����Ҫ�ɷ֣�����ʹvco���ֱ࣬��u1��u2��������90�Ȟ�ֹ���i��h4046ݔ����̖�Ƿ����������������_�P�·��ɾ�������������á�3��������4046�i���������l�ʴ���һ�����������Ա��ͨ�^���R1��R2��C1����D3��ʾ���M���{�������l�ʺ������l�ʣ�ʹ��M�㳬��늄әC������������D4��5��ʾ��
�����D4�͈D5���x��ͬ��C 1��R 1��R 2�����ԝM�㳬��늄әC�����l�ʷ������i��h4046���늉�VDD= 15 V�����քe�xȡC 1=240 pF�� R 1=100 k����R 2=1 M���������l�ʴ�s��20 kHz����C 1=240 pF��R 1��=1 M��R 2=�o�F�r������ |