�oˢֱ��늄әC�oλ�Â��������g���°lչ
������������飨�㽭��W���㽭����310027��
ժҪ����B�ˎN�oλ�Â������oˢֱ��늄әC���D��λ����̖�z�y��������څ�ݣ���Փ���������Ļ���ԭ�������F��������ȱ�c���M���ԡ�
�P�I�~���oλ�Â��������oˢֱ��늄әC��λ�Ùz�y
�ЈD���̖��tm30 �īI���R�aja ���¾�̖��1004 -7018 (2008) 09 -0056 -04
0����
�oˢֱ��늄әC�����{�����ܺá�Ч�ʸߡ������D�ش��Ʒ����`���׃���T�����c�����䑪�÷����鼰�����I������څ�V����1�������ǂ��y�ğoˢֱ��늄әC���ø��ӵ�λ�Â������z�y�D��λ�ã����H�����˳ɱ���늙C�Y���ď��s�ԣ�������ijЩ�ߜء��߉����ߏ����g�ԭh���У�λ�Â�����������ϵ�y�Ŀɿ��Ի��߸����o�����b����ˣ����F�oλ�ø����ğoˢֱ��늄әC���Ƴɞ�����oˢֱ��늄әC�lչ����Ҫ����֮��
Ŀǰ��������oˢֱ��늄әC�oλ�Â��������ƶ����÷�늄ݙz�y�����_�h���Ӽ��g���ַQ����ʽ���ӷ�������늄ݷ���2���������ֹ����졢�Ҋ���D��λ����̖�z�y�������ڑ����Ͼ��w�ؿɷ֞����N����늄��^���c������늄ݷe�ּ�����늉����^������늄ݷe�ּ��i��h�������ڏB늄ݷ�ֵ�c늙C�D�ٳ����ȣ���˷�늄ݷ������m���ڵ��ٷ�������Ŀǰ�V�����õ��_�h���Ӽ��g�����ijɹ����F�cؓ�d�D�ء�늙C��������ʩ늉��������������T���������P��������Ʋ�������������늙Cʧ����������ʧ��������S�����Բ��ϡ������������Ϳ��Ƽ��g�İlչ��ᘌ���ͬ�����������ʹ�È��ϣ��������ڟoˢֱ��늄әC�����Ӻ͵����\�з��������˂��ѽ�������T�����͵ğoλ�Â��������Ʒ���������Ԕ����BrĿǰ�о��^��ĎN����
1�����@�M늸з�
�����@�M늸з��ǽ����oˢֱ��늄әC�oλ�Â����������о��ğ��T����֮һ�����D��̎�ڲ�ͬ��λ�Õr���D�Ӵň��ڶ����@�M�Юa���Ĵ�朲�ͬ���Ķ������@�M��늸�ֵҲ��ͬ�������@һ���|����ͨ�^�z�y늸е�׃�����Д��D�ӵ�λ�á������@�M늸з�****�ă��c�ǣ���ʹ�����ٛ]�з�늄ݕrҲ����Ч�ؙz�y���D��λ�ã�
���ڵ��īI[3]ᘌ��@�M���ͽӷ��ă�Ƕʽ(ipm)ֱ���oˢ늙C�����늸Мy�������������@�M늸�����ȕr�̼������ڷ�늄��^���c���˕r�@�M�����c�λ��ֱ�������c늉������Ќ����{���s�C�M���ˌ��M�ܵ��ٕr��늄ӄݺ�С���������c�λ������λ����Ϣ���{�ٷ������_��500 -7 500r��min��
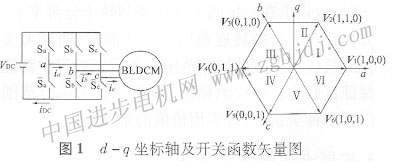
����꣬���m���^�����^�����Ķ����@�M늸з�����ԓ������늙C�D�ӽY���o����Ҫ���Ǹ��������F�ķǾ��ԴŻ����ԣ��������D�����ŘO�Ķ����ܱ����ҴŻ�[4-6]�����ڶ��Ӵ����F�Ĵ�ͬF�����Կ����ŘO�Ķ����@�M����혴ŷ��������׃���ʴ�����ŷ�������׃���ʡ��D�Ӳ�ͬλ�Õr��ͨ�^pwm׃�Q���o�����@�M�ڹ̶��ĕr�g�ȼӺ㶨��늉�ʸ�����t���^�����@�M�����ֵ��ͬ��ͨ�^���^�����ֵ�Ĵ�С���Դ_���D�ӴŘO��λ�á������@�M늸з��z�y�D��λ�÷֞�ɂ��A�Σ�һ��λ�õij�����Ӌ������λ�õľ��_��Ӌ����Dl��ʾ������d-q�����Sƽ�棬����d�S�����Ļ���ԭ�������È��ϡ���ȱ�c�����M���ԡ����D��n�Oλ�������Ķ����@�M���S���r������λ�ã��˕r���������@�M늸�ֵ��С�����·��������۷քe�O���_�P����������ʸ���ĸ�������·�����İ˷Nͨ���B��ʸ����ʾ���������H��r���D��ֻ�o�������Nͨ���B��ʸ����ʾ��
 늙C���ӕr����һ����С��ͬ�������෴��늉�ʸ���ڲɘӕr�gr�քe���ڌ����ඨ���@�M�ϣ�ͨ�^�����·��ֱ���h���ֵ�IJɘӡ����桢���^��ó��Y������λ�ù�Ӌ�ĵڶ��A�Σ��Ѱ�����d�S�Ұ�����ƽ���һ��늉�ʸ����t�ȷքe���ڌ����ඨ���@�M�ϡ���ֱ���h�����ֵ�ɘӡ����棬�����cǰ��@�õ�����ɘ�ֵ���^���Ķ������Mһ���_���D��λ�á����磬��һ�A�Σ���늙C�Ϸքe��늉�ʸ��v 1�cv 4��ͨ�^��ֱ���h�����ֵ�ɘӺ�քe�õ�i 1�ci 4���^��i 1�ci 4�Ĵ�С������d�S���D�ӴŘO���O��λ�ó����_����180��늽Ƕȷ����ȡ��ڶ��A�Σ���늉�ʸ��v 2�cv 6��t�ȷքe���ڌ����Ķ����@�M�ϣ��ڌ�ͨ�r�ڵ����r�̌�ֱ���h���i 2 |