�C�����ͬ���l(f��)늙C(j��)��(sh��)��늉��{(di��o)��(ji��)�����о�
���܊1,2��ʒ�N(y��n)Ԋ1�����o2
(1 ͬ��(j��)��W(xu��)���Ϻ�200092��2 �㽭������W(xu��)���㽭���A321004)
ժҪ����B�˻���dsp(tms320lf2407a)���C����Űl(f��)늙C(j��)��(sh��)��늉��{(di��o)��(ji��)������ԭ�����\(y��n)��pwm���g(sh��)�����l�_�P(gu��n)�ܺ�׃����(sh��)pid�㷨��(sh��)�F(xi��n)���l(f��)늙C(j��)ݔ��늉��Ŀ��ƣ���ʹ��delphi�O(sh��)Ӌ����λ�C(j��)�O(ji��n)�ؽ������(sh��)�H�\(y��n)�нY(ji��)������ԓ�{(di��o)��(ji��)�������{(di��o)�ٶȿ졢���ȸߡ����ܿɿ������c(di��n)��
�P(gu��n)�I�~���C����ţ�늉��{(di��o)��(ji��)����dsp��delphi
�ЈD���̖��tm341 �īI(xi��n)��(bi��o)�R�a��a ���¾�̖��1004-7018(2009)11-0021-12
0�� ��
���Ͱl(f��)늙C(j��)�M��������Դ���Ƅ��Դ�V���ؑ�(y��ng)����Ұ��o늾W(w��ng)�Ĉ��ϣ������C����şoˢͬ���l(f��)늙C(j��)���ھ���ͬ�е�늉��{(di��o)��(ji��)���㡢�����١��ɿ��Ըߵȃ�(y��u)�c(di��n)���õ�Ѹ�ٰl(f��)չ������{(di��o)��(ji��)���ǰl(f��)늙C(j��)����Ҫ�M�ɲ��֣��������C����|(zh��)�������P(gu��n)�I���á��F(xi��n)�е�ģ�M���늉��{(di��o)��(ji��)�����Ќ��·��ˇ��Ҫ��ߡ����ڜ�Ư�F(xi��n)�����١��S�o(h��)�������ȱ�c(di��n)���y�ԝM������O(sh��)���Ҫ��Ŀǰ������(n��i)һЩ���І�λ������һЩ���چ�Ƭ�C(j��)�Ą��늉��{(di��o)��(ji��)���������چ�Ƭ�C(j��)���ܵ����ƣ��^�y�M�����Ҏ(gu��)����늉��{(di��o)��(ji��)��������ָ��(bi��o)�����Ľ�B��һ�N����dsp��delphi���C�����ͬ���l(f��)늙C(j��)��(sh��)��늉��{(di��o)��(ji��)���������п��ƾ��ȸߡ����ɔ_������(qi��ng)��푑�(y��ng)�ٶȿ�ȃ�(y��u)�c(di��n)��������ЏV���Ĺ��I(y��)��(y��ng)��ǰ����
1����ԭ��
ÿ�N��(sh��)��늉��{(di��o)��(ji��)�����õ�̎����(cpu)��ͬ�����w�·Ҳ��������e�������ڲ��Ͱl(f��)늙C(j��)�@�NС���C����şoˢͬ���l(f��)늙C(j��)���ԣ����Ą���{(di��o)��(ji��)������Ҫ�Y(ji��)��(g��u)��ԭ�������Ƶģ�����ԭ���ͽY(ji��)��(g��u)��D1��ʾ��
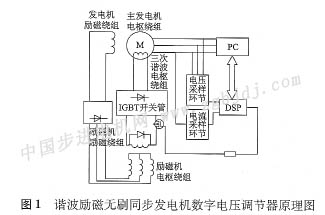
�C����şoˢͬ���l(f��)늙C(j��)�Ĺ���ԭ���ǰl(f��)늙C(j��)���C���@�M�a(ch��n)���������C��늉���(j��ng)�^���ɿ�ȫ������ֱ�������řC(j��)�Ą���@�M�ṩ�Դ������(y��ng)���ڄ�řC(j��)��늘��@�M�ϸБ�(y��ng)������늣���(j��ng)�^���D(zhu��n)���������ɵ�ֱ�����o���l(f��)늙C(j��)�Ą���@�M�������l(f��)늙C(j��)���ԣ���řC(j��)������Ŵ�����ã��o���l(f��)늙C(j��)�Ą���@�M��늣�����ʹ���˄�řC(j��)�����D(zhu��n)��������ʹ늙C(j��)��Ō�(sh��)�F(xi��n)�˟oˢ����늙C(j��)��늉�ͨ�^늉��ɘӭh(hu��n)��(ji��)�D(zhu��n)�Q���m����ad׃�Q�˿�Ҫ�����늉�(o��5v)�����⣬�l(f��)늙C(j��)ؓ(f��)�d���ͨ�^����ɘӭh(hu��n)��(ji��)�D(zhu��n)�Q��dsp���ܵ�0��5 v늉�����(sh��)��늉��{(di��o)��(ji��)���Ĺ���ԭ���ǣ�늉��������y����ͬ���l(f��)늙C(j��)��늉��c�o��ֵ�M(j��n)�б��^������(j��)��늉�ƫ���һ���Ŀ����㷨Ӌ�������������׃�댧(d��o)�w�_�P(gu��n)�����}�_����ռ�ձȣ��Ķ���׃��řC(j��)�Ą������_(d��)���pС�l(f��)늙C(j��)��늉�ƫ���Ŀ�ġ�ͬ�r������{(di��o)��(ji��)��߀����ͨ�^�y���l(f��)늙C(j��)�ğo�������(sh��)�F(xi��n)�l(f��)늙C(j��)�IJ�(li��n)�\(y��n)�С�
2ϵ�y(t��ng)�O(sh��)Ӌ
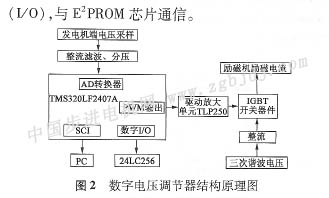
2.1����{(di��o)��(ji��)���Ļ����Y(ji��)��(g��u)
����(j��)�{(di��o)��(ji��)���ĽY(ji��)��(g��u)��ԭ�������Դ_��dsp����{(di��o)��(ji��)���Ļ����Y(ji��)��(g��u)����D2��ʾ�����������ׂ�
ģ�K��
(1)ݔ��z�yģ�K���书���nj�(sh��)�F(xi��n)늉���̖�IJɼ�������ͨ�^dsp��ad׃�Qͨ������ģ�M���D(zhu��n)�Q�ɔ�(sh��)����������ָ����Ԫ���������{(di��o)�ã�
(2)pwmݔ��ģ�K���书���nj�(sh��)�F(xi��n)�ͳ����Ʒ����(q��)��mosfet�_�P(gu��n)�ܣ����������x�Ŵ��·��
(3)����ͨ��ģ�K���书���nj�(sh��)�F(xi��n)dsp�cpc�C(j��)ͨ�ţ�ͨ�^dsp�Ĵ���ͨ�Žӿ�ģ�K(sci)����(j��ng)�ƽ�D(zhu��n)�Q�·���B�ӵ�pc�C(j��)��
(4)��(sh��)�r�惦ģ�K���书���nj�(sh��)�F(xi��n)�ھ��惦һЩ��Ҫ�Ŀ��Ɣ�(sh��)��(j��)��ͨ�^dsp�Ĕ�(sh��)��ݔ��ݔ��ģ�K
2.2׃����(sh��)pid�㷨�đ�(y��ng)��
dsp�IJ��ý�Q�˄���{(di��o)��(ji��)��ϵ�y(t��ng)�Ŀ����Ԇ��}��ϵ�y(t��ng)�����п�����Ҫ��֮�⣬߀�п��ƾ��ȵ�Ҫ��Ҫ�_(d��)���^�õĿ��ƾ��ȣ���횲���һ�N�õĿ����㷨�����IJ��÷ֶ�����ʽpid�㷨����(j��ng)�^pid�\(y��n)��Ӌ���pwm����ռ�ձ�׃������pk����(d��ng)ǰ��(y��ng)ݔ����ռ�ձȵ���ǰһ��ݔ����ռ�ձȼ��ϡ�pk������

���˽�Qϵ�y(t��ng)�����Ժͳ��{(di��o)֮�g��ì�ܣ�kp��ki��kd��������(sh��)�������{(di��o)��(ji��)�^������Ҫ����(j��)ϵ�y(t��ng)�o���׃���������� |



