�p�Dʽ���şoˢ늄әC�Ŀ���
����
(��Ȫ늙C�S���F���F�550008)
ժҪ������ͨ���şoˢ늄әC���A�ϣ��������p�Dʽ���şoˢ늄әC�Ĕ��Wģ�ͼ��ٶ��]�h���Ʋ��ԣ�����ԓ���A�Ͻ�����tms320f2407����ĵ��]�h����ܛӲ��ϵ�y�����M����ԇԇ�Y������ԓ�N����ϵ�y���������^�ã����ƾ����^�ߡ�
�P�I�~���p�Dʽ�����şoˢ늄әC���]�h����
�ЈD���̖��tm33 �īI���R�a��a ���¾�̖��1004-7018(2009)11-0026-02
0�� ��
�p�Dʽ���şoˢ늄әC�c��ͨ���şoˢ늄әC�ą^�e����ԭ���oֹ�Ķ���Ҳ�������ɵ����D�����ߵ�늴��Pϵ����ͬ�ģ������\��Ҏ�ɲ�ͬ����ͨ���şoˢ늄әC��늴��D�H���D�ӴŘO���D����늘����oֹ���ӵģ����p�Dʽ���şoˢ늄әC��늴��D�t�Ӄ���ɂ��D�����෴�ķ������D��������ͨ�����şoˢֱ��늄әC���Q����Ϣ�����D���c����֮�g������λ�ã��������p�Dʽ���şoˢֱ��늄әC���Q����Ϣ���ԃɂ��D��֮�g������λ�á����ڛ]�ГQ�������Ч���Լ��ɂ��D�ӌ��D�����c��Ŀǰ�p�Dʽ���şoˢ늄әC��Ҫ������ˮ�����Mϵ�y��
��������ͨ���şoˢ늄әC���A�ϣ������p�Dʽˮ�şoˢ늄әC�Ŀ���ģ�ͣ�����늙C���ƌ���dspоƬtms320f407���p�Dʽ���şoˢ늄әC�M���ٶ�����]�h���ơ�
1�p�Dʽ���şoˢ늄әC���Wģ��
���O�p�Dʽ���şoˢֱ��늄әC�ĴŘO�D������rᘷ����������늘��D����형rᘷ�����������æ�r1����r2 �քe��ʾ�ɂ��D�ӵĽ��ٶȣ��t������ͨ���şoˢֱ��늄әC���Wģ�ͣ����ɵõ��p�Dʽ���şoˢֱ��늄әC�ĺ������Wģ�͞飺

ʽ�У�u���Դ늉���e��늘��@�M��늄ӄݣ�iacp��ƽ��늘������tamp��늘��@�M��ƽ����裻��u�鹦�ʾ��w�ܵ�͉�����b1��b2�քe��ɂ��D�ӵ�Ħ��ϵ����j1��j2�քe��ɂ��D�ӵ��D�ӑT����p��

���ڲ�ͬ��늘��@�M��ʽ�͓Q�ྀ·��ʽ��늘��@�M��늄ӄ��в�ͬ�ı��_ʽ������Փ�ηN��ʽ���ɱ�ʾ�飺


��ʽ(7)��ʽ(8)���Կ����������ֱ��늉�һ�����t�pС늙C��ؓ�d���D�����ߣ���׃�����|�l�l��Ҳ�����ߣ�ͬ�r��늄����ӣ�����pС��늴��D��Ҳ�pС����늴��D�غ�ؓ�d�D��ƽ��r��늙C�;S����һ���^�ߵ��D���\�С����ؓ�d��׃��������ֱ��늉����t�D����ߣ���׃�����l��Ҳ��ߣ���늄�����ʹ����pС��늴��D�سʬF�pС��څ�ݣ��@�Ӿ�ʹ늙C�S����һ���^�ߵ��D���\�С��ɴ˿�Ҋ�������p�Dʽ���şoˢ늄әC����ͬ���ԣ����{�ٷ����c��ˢ늄әC�{�ٷ�ʽ��ƣ�����ͨ�^�{�����ֱ��늉����{�١����������Ŀ��Ʋ���˼�룬�����OӋ���p�Dʽ���şoˢ늄әC����ԭ����D��D1��ʾ��
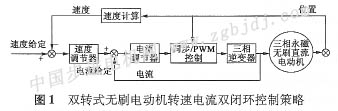
�ɈD1��֪����ϵ�y�����ٶ��c����p�]�h�M�ɣ���h���ٶȭh��ͨ�^�ɼ��ٶ��c�O���ٶȱ��^�����ֵͨ�^pid�{��ݔ���c�ɼ�������^��pidݔ���{��pwm��ռ�ձȣ��Ķ�����늙Cϵ�y��ָ�����ٶ��\�С�
2�p�Dʽ���şoˢ늄әC����ϵ�y�OӋ
2.1Ӳ��ϵ�y
�p�Dʽ���şoˢ늄әC�ٶȿ���ϵ�y��D��D2��ʾ��
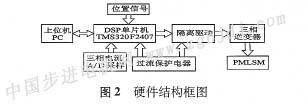
�ڈD2�У�tms320f2407����������ϵ�y�ĺ��ġ�������λpc�C��canͨӍ�@�ýo�����ٶ�ָ���a��d�ɘ��·�@������������Hֵ������λ�Â������@��늙C���ӵČ��Hλ����̖�����^tms320f2407�\��ݔ����·pwm��̖����������x�Ӻ��|�lipm������׃�·���_�������ٶȵ�Ŀ�ġ�
|



