bldcmλ���ŷ�ϵ�y���xɢ׃�Y������
�����飬�K�@��
(�F�ݴ�W���F���F�550025)
ժҪ��ᘌ�bldcmλ���ŷ�ϵ�y�ą������_�����أ����һ�N���ڔ_�ӄӑB�a���ĽM��څ���ɣ�̽ӑԓϵ�y���xɢ׃�Y�����������ڿ������������£���Փ�ϫ@�Cԓϵ�y�ķ����ԡ����Y���@ʾϵ�yݔ����늄әC��ؓ�d�D�غ��D�ӑT���Ĕz�Ӿ����^���������ԣ��_���˽���ϵ�y�Ķ������߿��ƾ��ȵ�Ŀ�ģ���Ч����rϵ�y�Ŀ����|����
�P�I�~��bldcm��څ���ɣ��xɢ׃�Y�����ƣ�������
�ЈD���̖��tm33 �īI���R�a��a ���¾�̖��1004-7018(2009)11-0028-04
0�� ��
���şoˢֱ��늄әC(���º��Qbldcm)���H�Y�����Ρ��\�пɿ����S�o���㣬���Ҿ����^�ߵ��\��Ч�ʺ��^�õ��{�����ܣ�����ڸ߾���λ���ŷ�ϵ�y�еõ��ˏV������[1]����������늄әC����׃����ؓ�d�_�ӵ�Ӱ푣��y�Ԍ��F�����ܵľ��_���ơ��S��������Փ�İlչ���S�����M���Ƽ��g����Ч���늄әC���\�����ܣ���ģ�ͅ������m�����ơ�ģ�����ƺ��W�j����[2-3]����ģ�ͅ������m�����ƌ�늄әCؓ�d�Ŀ���׃���e���У�ģ�������������sģ��Ҏ�t��Ӱ푣��W�j����������Ҫ����ͨ�^�W�����{����ֵ������Ӳ�����F��һ�����y�ȡ�׃�Y��������һ�N���Á�̎�����ԺͷǾ���ϵ�y���������Ʒ��������Ļ���ģ�B���в�׃�ԣ������cϵ�y�Ĕz�Ӻ���ɔ_�o�P��ʹ���m��늄әC�ŷ�ϵ�y�Ŀ���[4-5]��
�S��Ӌ��C���g�Ŀ��ٰlչ���I�Ԅӻ����I��Č��H��Ҫ���xɢ׃�Y��������늄әC�����I�����^�V���đ���ǰ��������bldcmλ���ŷ�ϵ�y�д���늄әC����Ư�ƺ�ؓ�d�_�ӣ����������|����һ�����в��_�������صķǾ���ϵ�y���������xɢ׃�Y�����Ƶ��о������ڌ�ϵ�y���_�������صĹ�Ӌ���a�����Լ�����ϵ�y�Ķ���ᘌ���Ӌ���a�����}����������ϵ�y�������ԣ��īI[6]������ģ���׃����r�����䶨�x�Ĕ_�Ӿ�ֵ�͔_��ƫ��ľ��ԽM�Ϲ�Ӌϵ�y�еIJ��_��헣��Ɍ��F�����_�������ص��o�B�a�����īI[7]���Õr�Ӽ��g���_�������M���ھ���Ӌ���ɵ���ϵ�y�е���׃���_���Ե�Ӱ푣��˷�����Ҫ���֪�R�����ƣ��īI[8-9]�քe�OӋ�˔U����B�^�y���ͻ�ɫ��Ӌ�������F���_�ӵ��ھ���Ӌ���a�������^�õp�������z�Ӻ��ⲿ�ɔ_��׃�Y������ϵ�y��Ӱ푣��īI[10]�OӋ��һ�N���_�ӄӑB�a�����xɢڅ���ɣ�����ه��ģ�汾���Ěvʷ�������Ɍ��F���_�ӵĄӑB�a������ϵ�y�����z���c�ⲿ�_�Ӿ����^���������ԡ�����ϵ�y�Ķ����}���S���о��ɹ�Ҳ���^����������磬�īI[6]��څ�����еą�����ʩ�s�����ƣ�����څ�����еķ�̖�����Q��ͺ�������������څ���Ʌ�������Ķ����Լ�����Ч����ϵ�y���ȣ��īI[1]-[3]ͨ�^������څ�����M�и��M���OӋ�ˎN���͵�څ���ɣ��ܸ��õ�����ϵ�y�Ķ���ͬ�r������Ӌ����s�ȣ�ʹ�ù��̌��F���^���y��Ŀǰ���^��V������������ϵ�y����ķ�����M��څ����[14-15]���˷�����ָ��څ���ɡ�׃��څ���ɡ���Ч�����ɵ��ЙC�Y�ϣ�������ʹڅ��ģ�B��������Ʒ�|���sС�ʻ���ģ�B�����Լ���ʹ��B����څ�����c��
��������xɢ׃�Y������ϵ�y��Ʒ�|����Ҫ�C�Ͽ��]���_��ϵ�y���a����ϵ�y����Ȇ��}������ᘌ�bldcmλ���ŷ�ϵ�y�������_���ԣ����ڔ_�ӄӑB�a���ͽM��څ���ɣ�̽ӑһ�N�����xɢ׃�Y������������Փ�����@�C��ԓ�����������£�ϵ�y�����^�õķ����ԣ����Y���@ʾԓ����������Ч�ġ�
1�xɢ׃�Y��������������Փ�Y��
�����xɢ׃�Y�����Ƶ�bldcmλ���ŷ�ϵ�y��ԭ����D1��ʾ���D�У�ku��pwm���ʷŴ���
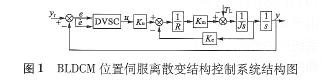
�ķŴ�ϵ����r��늘���裬km��늄әC�D��ϵ����ke�鷴늄ӄ�ϵ����j���D�ӑT����yr�酢����̖��y��ϵ�y��λ��ݔ����u�����ݔ�룬dvsc��ʾ�xɢ׃�Y��������������늘�늸У�bldcm�����Ķ��Aģ�͞飺

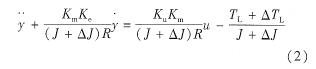
��ģ���еą���j�ڌ��H�h���г����F����Ư�ƬF����ؓ�d�_��tlҲ�Dz��_���ģ������Ҫ���]ϵ�y�������ԡ���ˣ����]ʽ(1)���D�ӑT����ؓ�d�D�صIJ��_�������أ�ԓʽ�Č��飺
|



