���m��ģ����ģ�������ŷ�늄әCϵ�y(t��ng)�еđ���
�����_����һ�裬����������־�h
(��ɽ��W���ӱ��ػʍu066��004)
ժҪ���OӋ��һ�N���e�ֻ�ģ������m��ģ����ģ����ϵ�y(t��ng)�������䑪�����ŷ�늄әC��λ�ú��ٶȿ���ϵ�y(t��ng)�С����m��ģ����ģ����ϵ�y(t��ng)����ģ�����ƺ�hitting���ƽM�ɵģ���ģ�������OӋ�У���ģ����������ģ�M�������Ի������ɣ���hitting�����OӋ�У���hitting���������a���������Ի������ɺ�ģ��������֮�g���`��{(di��o)��(ji��)�㷨�Ǐ�hapunov��(w��n)������Փ�õ��ģ��Ķ����Ա��Cϵ�y(t��ng)�ķ�(w��n)���ԣ����Ҟ龏�⌦�����`������Ҫ�������һ�N�`���Ӌ�C�Ɓ팍�r�^�y�����`��硣����Y���C�������OӋ��ϵ�y(t��ng)���Եõ����˝M��ĸ�ۙ���ܣ����Ҍ�����(sh��)׃�����ⲿؓ�d�_�Ӿ��������ԡ�
�P�I�~�����m�����ƣ�ģ�����ƣ���ģ���ƣ��ŷ�늄әC
�ЈD���̖��tm383��4 �īI���R�a��a ���¾�̖��1004��7018(2009111��0032��05
0 ����
ʹ���Z����Ϣ��ģ�����Ɠ��������ԏ�����ģ���^���ɡ��M��ȫ�ֽ�����Փ��Ҏ(gu��)�t�㷨�����c[1-3]�������ڸ��Aϵ�y(t��ng)�У�������ģ��Ҏ(gu��)�tʹ�����dz����s��20���oĩ���о��ˆT�����ģ����ģ�������ĸ���[4-6]�����ֻ���x��һ��ģ��ݔ��׃�����黬ģ��׃����ģ����ģ����ϵ�y(t��ng)����Ҫ��(y��u)�c����ģ��Ҏ(gu��)�t�Ĕ�(sh��)���ȷ������Ի�����ϵ�y(t��ng)Ҫ�ٵö࣬����ͨ�����`����`���׃��������ģ��ݔ��׃����choi�����÷Q���̖����(sh��)�Ć�ݔ��ģ��׃�����OӋģ����ģ�����������`�ٶȺ���(sh��)����ǵȸߵĵ��������ε���ʽ[4]��palm�OӋ��һ����ģģ�������������`����`��׃���ʱ��C�˻�ģ�������е��_�P��(sh��)����****ֵ�����ڿ����^������Ҫ�^���ģ��Ҏ(gu��)�t[5]��yu���˽�����һ�M����ģ�́��OӋ�����������������OӋ�����ڸ��Aϵ�y(t��ng)���^�y�M�з���[6]������һЩ�W����������m��ģ�����Ƶĸ���[7-8]������ȫ�ֽ�����Փ�����m��ģ�������OӋ��������ͨ�^�����s�Ľ��ƺ���(sh��)�鎧�����@�IJ��_���Ǿ�^�����ķǾ���ϵ�y(t��ng)����lvapunov��(w��n)���Ŀ�����[9]��ͨ�^�@Щ������ģ��Ҏ(gu��)�t�����Ԅ��M���{(di��o)����ͨ�^�ӑB(t��i)���m���Ɂ��a(ch��n)�����˝M���ϵ�y(t��ng)푑����@Щ���Ʒ����������`����`��׃��������ģ��ݔ��׃���������ڌ��H����Ҫ�^���ģ��Ҏ(gu��)�t���������OӋ�^������Ҫ�M�Ї�������ƺ͌����،���Ľ�(j��ng)�֪�R��
���ĵ�Ŀ����Ҫ�OӋһ�����m��ģ����ģ���Ʒ������˷���ǰ�����е�ȱ�ݡ��@��ϵ�y(t��ng)�����c���m��ģ������һ���Ԅ��{(di��o)��ģ��Ҏ(gu��)�t�����ҿ�����ģ����ģ����һ���@���p��ģ��Ҏ(gu��)�t�Ĕ�(sh��)������ϵ�y(t��ng)���D��Q���І��}��(1)�܉������Z����Ϣֱ�ӑ����ڿ�������(2)���C���õ����]�h(hu��n)ϵ�y(t��ng)��lyapunov��(w��n)���ġ����˾��⌦�����`������Ҫ����һ�N���εĹ�Ӌ�㷨�팍�r�^�y�����`��硣����������ھ��{(di��o)��(ji��)��������@�������˶���F(xi��n)�����ķ���Y���C�������OӋϵ�y(t��ng)����Ч�ԡ�
1�ŷ�늄әC�Ĕ�(sh��)�Wģ��
���ڬF(xi��n)�������ϳ�Ҋ�Ĵ��ʽ����ŷ�늄әC����������ͬ��늄әC���(zh��)��늙C����˱��ĵĿ��ƌ���ģ�����������ͬ��늄әC�Ļ��A�Ͻ����ġ�����ͬ��늄әCͨ�^���D���ϰ��b�����w���ڶ����@�M��ͨ�뽻��늣��Ķ��a(ch��n)�����D�ň����M���D�ӵģ���������D�����D�ٶȺͶ����@�M���a(ch��n)�������D�ň����ٶ�����ͬ�ģ��ʶ����������˱��ڷ������}���҂��������¼��O��
(1)���Դ�·ͼ��F�p,���@�M���Ըкͻ��ж��Ǿ��Ե�;
(2)�����@�M���Q�ń��ؚ�϶�A�ܰ����ҷֲ�;
(3)�����]�ضȺ��l��׃����늙C����Ӱ푡�
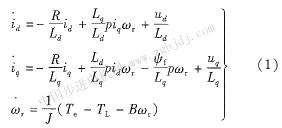
�������ϼ��O���҂����Եõ�����ͬ��늄әC�ڃ����oֹ����ϵd-q�µĔ�(sh��)�Wģ�ͣ�
ʽ�У�ud��uq�鶨��늉�d��q�S������id��iq�鶨�����d��q�S������ld��lq�鶨��늸�d��q�S��������f���D�������w�a(ch��n)���Ĵ�朣�r�鶨����裻p��O����(sh��)��j���D���D�ӑT����b��ճ��Ħ��ϵ��(sh��)����r���D�ӽ��ٶȣ�te��늴��D�أ�t1��ؓ�d�D�ء�
��ʽ(1)���Կ���������ͬ��늄әC��ģ���ǷǾ���ģ�ͣ���d�S�������k d��q |