���چ�Ƭ�C�cfpga�Ķ��ؼ��ֲ��M늄әC��ϵ�y
����ͤ���_�i�x
(���ִ�W�麣�WԺ���V�|�麣519041)
ժҪ����B�˲��M늄әC���ֿ��ƣ�����˻��چ�Ƭ�C�cfpga���Ƶ�pwm�����Ӽ��g�����Æ�Ƭ�C���O��늙C���D�١��D����fpga�a���A���}�_�γ��A����늉���̖�Կ��Ʋ��M늄әCÿ���@�M�ڸ��r�̵�늉����Ķ����F���M늄әC�D�ǵ����⼚�ֿ��ơ�����vhdl�Z�Ծ��̌��F�˲��M늄әC256���ֿ�������pwmģ�K���ٶȿ���ģ�K�����ֱ��^ģ�K�ȹ��ܡ�
�P�I�~��fpga��vhdl�����M늄әC�ӣ����ֿ���
�ЈD���̖��tm383��6 �īI���R�a��a ���¾�̖��1004��7018(2009)11��0037��04
0�� ��
���M늄әC����һ�N��}�_��λ�Ƶ��D�QԪ���������}�_��̖���ƣ���λ���cݔ���}�_�����ɇ��������Pϵ������fpga���Ʋ��M늄әC���������е�eab���Ԙ��ɴ��늙C�����������Ŀ��Ʋ��Δ�����������fpga�OӋ�Ĕ��ֱ��^������ͬ���a����·pwm������Σ������ಽ�M늄әC�M���`��Ŀ��ơ���׃���Ʋ��α��Ĕ���������Ӌ������λ��������g���ȣ��Ķ����Ԍ����M늄әC�IJ��M�D���M�����⼚�֣����F���M�D�ǵľ��_���ơ���fpca���F��·pwm���ƣ��o�����d��a�D�Q����ʹ��ͬ�����·��������Ʒ�ʽ���������ƾ��ȸߡ�����Ч���á��Æ�Ƭ�C��dsp�Ŀ��ƶ��y���_��ͬ�ӵĿ���Ч����
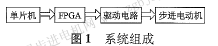
1ϵ�y����
ϵ�y������D1��ʾ�����Æ�Ƭ�C���O��늙C���D�١��D����fpga�a���A���}�_�γ��A����늉���̖�Կ��Ʋ��M늄әCÿ���@�M�ڸ��r�̵�늉����Ķ����F���M늄әC�D�ǵ����⼚�ֿ��ơ�����vhdl�Z�Ծ��̌��F�˲��M늄әC256���ֿ�������pwmģ�K���ٶȿ���ģ�K�����ֱ��^ģ�K�ȹ��ܡ��x�Ã�Ƭl293d��оƬ�Ӄ��_���࣯���ಽ�M늄әC��
l.1���M늄әC������Ӳ������
������늙C�����ӵ���Փ�о�������˻��چ�Ƭ�C�cfpga���ƵĶ��ؼ��ֲ��M늄әC�Ӽ��g����ϵ�y��Ӳ���·��Ҫ�Ԇ�Ƭ�C��fpga�������������Ӳ���·�ĽM����D2��ʾ��
��Ƭ�C�����w����p89v53rb2оƬ��ͨ�^��Ƭ�C��po����fpga�l�Ϳ�����̖������po����һ��8λ�_©�p��i��o�ڣ���������У��ͨ��l��o�ڕr�����B��һ���ⲿ������衣fpga���_�O����43��36����Ҫ����D�١��D��늙C�����֔����O��������s0��s2�Á��_�����֔������������_��000��111�քe���F256��128��64��32��16��8��4��2���֣����w��r���1��ʾ��
���������x�õ�fpga������xilinx��˾��xc2s15оƬ��reset��̖�Á팦fpga��λ(��l���r��Ч)��clk�Ǵ惦����ַӋ�����}�_ݔ�룬��������Ч��pwmclk���}���r犣�һ���12 mhz��****200mhz��dir�Dz��M늄әC���D����̖(��1�������D����0���鷴�D)��csl��cs2�քe�Á�����fpga�Ȳ����M늄әC����ģ�K���x�������_�����ƶ��_���M늄әC�����á����⣬xc2s15����86���Ñ��Զ��xi��0�ڣ���Q�ˆ�Ƭ�Ci��o�ڲ���Ć��}����˿��M�ж��_���M늄әC�Ŀ��ƣ����x�Ã�Ƭ1��293d��оƬ�Ӄ��_���࣯���ಽ�M늄әC��
1��2��Ƭ�Cϵ�yܛ���Y��
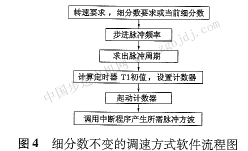
��Ƭ�Cϵ�y�� Ҫ��ɲ��M늄әC�{�ٿ��ơ��D���֔����O������Ƭ�C��ɲ��M늄әC�{�ٿ��ƷփɷN��ʽ�����֔���׃����׃���M�}�_���l�ʺͲ��M�}�_���l�ʲ�׃���x��ͬ�ļ��֔������Ԍ��F8�N�\���ٶȡ����M�l�ʲ�׃���{�ٷ�ʽ��ܛ�����̈D��D 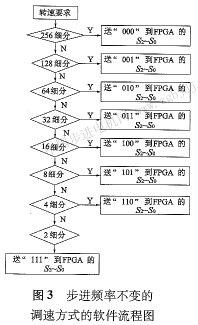 3��ʾ�����֔���׃���{�ٷ�ʽܛ�����̈D��D4��ʾ��
1��3 fpga�OӋ�c����
�������M늄әC������ԭ�����x�����pwm�}���{��ʽ�����ӣ��������־��ȵ�Ҫ�Q������Ҫ��****����������Σ��OӋ���༚�ֵ�ϵ�y���ɡ��D5�鲽�M늄әC������ |