��λ��ǰ���ڟoˢֱ��늄әC�{���еđ���
�՝ɰ������x�������������
(���ϴ�W�������Lɳ410082)
ժҪ��ᘌ��oˢֱ��늄әC�ڸ����\���д��ڵĆ��}�����һ�N����ߟoˢֱ��늄әC�{�ٷ������·������Q֮����λ��ǰ����ԓ������ʹ�oˢֱ��늄әC�ڸ����\�Еr���F�㹦�ʿ��ơ�������ˎ���λ��ǰ�ǵğoˢֱ��늄әC�p�]�h����ϵ�yģ�ͣ�����Y���C����ԓ�����Ŀ�������
�P�I�~���oˢֱ��늄әC����λ��ǰ���㹦�ʿ��ƣ�����
�ЈD���̖��tm33 �īI���R�a��a ���¾�̖��1004��7018(2010)01��0024��03
0����
���şoˢֱ��늄әC���н���늄әC�Y�����Ρ��\�пɿ��;S�o�����һϵ�Ѓ��c���־߂�ֱ��늄әC�\��Ч�ʸߡ��o��œp�ļ��{�����ܺá������D���^������c���ڹ��I�I��õ��ˏV������[1]�����ǣ��ڸ����\�Еr���oˢֱ��늄әC�����ɷ���l����׃����(1)�D���}�ӱ��^��(2)�{�ٷ����ܵ����ƣ��o�����F�㹦�ʿ��ơ�
�īI[2]�������@һ�F������l�c����ν���늙C�ڸ��٠�B�µ��D���}�ӣ�ԓ�īIͨ�^���Q�����g������ķ����ó�늙C�ڸ��٠�B���D���½���ԭ��Ȼ�����һ�N��ǰ��ͨ�ķ����������������Č�ͨ�^��Ҏ��ǰһ��С�ǶȦȡ����Q�鳬ǰ��ͨ�ǣ��Ķ�ʹ늙C�ړQ���r��ͨ�Ǵ���pС����K�_���p���D���}�ӵ�Ŀ�ģ����M���˷������[2]����ԓ�īI��δ����ǰ��ͨ��(���ķQ֮����λ��ǰ��)��Ӌ�������w�f���������ڼٶ���λ��ǰ���c�C���ٶȳɾ��Ե�ǰ���µó�һ�����ε�Ӌ�㹫ʽ���īI[3]��Ҳ�ᵽ�^��λ��ǰ�ĸ������λ��ǰ���@һ׃������늙C�����У����҂��{ԇ�rֱ��ʹ�ã���ָ���m������λ��ǰ�������늙C���{�ٷ���[3]����ԓ�ě]�нo��늙C�ٶ��c��λ��ǰ�ǵľ��w�Pϵ������Ҳ�]�Ќ�����{�ٷ�����ԭ�������������
���Č��oˢֱ��늄әC(���º��Qbldcm)�ڸ����\�Еr������늙C���{�ٷ������Ķ����Fϵ�y�ĺ㹦�ʿ����M����Փ������������Փ�Ϸ�bldcm�ڸ����\�Еr���ڵĆ��}���ڴ˻��A�������λ��ǰ�����ڹ��ʹ܌�ͨ�IJ�ͬ�A�Σ���������������������_ʽ���ƌ�����λ��ǰ�ǵ�Ӌ�㷽��Ȼ�����matlab��������c��C��ԓ�����������bldcm���{�ٷ�����
1 bldcm�ڸ����\�Еr���ڵĆ��}����
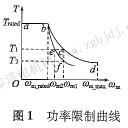
bldcmһ�����������ٶ��p�]�h���ơ��˷N���Ʒ�����bldcm���~���D�����r���F���D�ؿ��ơ�Ȼ������늄�܇��늄ӹ��ߵȌ��H�����У�ϵ�yҪ��늙C�ںܸߵ��ٶ����\��(���������~���D��)�������B�£���bldcm�D�ٸ����~���D�ٕr��늙C�D�ؕ��S��늙C�ٶȵ�������pС��늙C�ɺ��D�ؿ���׃��㹦�ʿ��ơ��D1�f�����@һ���c����������bcd�Q�鹦������������Ȼ�������h��늉�͵����ƣ������κ�������Ʒ�����bldһcm�o�������ڹ������������ϡ�����6�V��늙C�ڟo�κ�������Ʒ����µĹ���܉�E�������҂����ˬF����
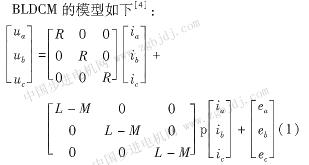
 ����. ʽ��:r��ÿ�ඨ�����;l��ÿ�ඨ��늸�;m�鶨���g����,�ڴ˺������D��λ�Ì�늸е�Ӱ�,p=di/dt.����һ���늉����Ա�ʾ��:
�~���D�����ϕr��늙C������˝M��o���D�ص�Ҫ��һֱ�����o늙C�Ľo��늉��s�ǂ�����ֵ�����Ԯ��������һ���̶ȕr��늙C�ķ�늅��ݾͲ��������ˡ�����늄ӄ��Ǻ�늙C�ٶȳ����ȵģ��ٶ��o���D����t1��������r�£��_���@һ�D�ؕr��늙C�ٶȞ�,���������ܵ���늄ݵ�����늙C�ٶ�ֻ���_��(��e�c). ͬ��,�����늙C�D����ߵ�(��f�c),��ô늙C�D�ؾ͕��������F�㹦�ʿ��Ƶ�.
2����λ��ǰ�ǵ��о�
2��1��λ��ǰ�������
��ǰ��ķ������Կ�����bldcm���~���D�������\�Еr���{�ٷ����ܵ����ƣ��Ķ�����أ�����F�㹦�ʿ��ơ����Ľ�Bһ�N��λ��ǰ�ķ�������Q�������}����bldcm����ȃr�·�D��������D2��ʾ���D��q 1��q 2�ǹ����_�P��d 1��d 2�Ƿ������O�ܡ���늙C�\�����~���D�����ϕr��ʹq 1�Č�ͨ������ǰ�ڷ�늄ӄ�һ��늽Ƕ� |