����ͬ��늙C�п������Б��ļ����D�ز���
ժҪ��
�������ҷ�늄ӄݵ�����( pm)ͬ��늙C��������؟o�D�ز����\�С�Ȼ��������늙C�OӋ���������ԕ��a�������D�ز��ӡ����Č�ϵ�y(t��ng)�ط�������늙C��������ȱ��������ͬ��늙C���D�ز��ӵĿ��܁�Դ�����]�˾��a�����ķֱ��ʡ�������cpu���L������z�y�e�`�Լ���׃���}�_�����{���_�P��Ӱ푡�ӑՓ��ÿ�N��Դ��������Ӌ���D�ز��ӵķ�����ӑՓ�˲�ͬ�����D�ز��ӵ����c��Ҳ��B��ԇ���攵(sh��)��(j��)��C�@Щ��Ҫ�YՓ��
�P�I�~��
cpu���L��������ƣ�����z�y���ȣ���(sh��)�ֿ��ƣ���(sh��)�ֻ��e�`�����a���ֱ��ʴň���λ����������Ӱ푣������D�ز��ӣ�����ͬ��늙C������늄әC���}���{�ƣ�pwm��׃�����D�ز���
1��B
�ڌ���o�D�ز��ӵ�����늙C�ӵ��^���У����Կ����������Ҳ���늄ӄ�(emf)������늙C�Ⱦ������β���늄ӄݵ�����늙C��(y��u)Խ����ʩ����������r���������������늙C�ܮa�����D�ز��ӵ��B�m(x��)�D�ء���Փ�ϣ���ʩ�ӷ�������������η�늄ӄݵ�����늙CҲ���ܮa�����D�ز��ӡ�Ȼ������鷽�������ζ��һ��������Ǝ���������һ��di/dt���a���@һ��������@Ȼ�ǟo���H���x�ģ�������늙C��늸С��Ƿ�������Y�����Ǯa��ֵ�ÿ��]���D�ز��ӣ���������֪���ēQ���D�ز��ӡ��෴�ģ���������늙C�D���������������Ҫ����������Ǝ������a���@��һ����������ǿ��еģ��e����늙C���ٕr������ͬ��늄әC�����һ�������ğo�D�ز��ӵ�����늙C������횻�������ͬ��늙C��
Ȼ��������늙C�OӋ�Ϳ������\�еľ��ޣ���ʹ�����Ҳ�����늙C���У������D�ز�����Ȼ���ڡ���늙C�OӋ���^�c���������Ҳ���늄ӄ���Ҫ��ͨ���@�M�����ҷֲ������ڴŻ��ľ��Ͳ۾�Ȧ����Ŀ����ԣ���늄ӄ��е��C���Լ��ɴˮa�����D�ز����Dz����ܱ���ġ����ң����w���_��늙C�IJ�֮�g�Ľ������îa��һ��������Ĵ���������һ�����^���X���D�ء����⣬�����D�ӵ�ƫ�ģ��ŵIJ����QҲ�ܮa���D�ز��ӡ��P��늙C�OӋ�ķ������˷��@Щ���}�ķ������īI[1][2]�������˺���Ҫ�Ŀ��]��������Ҫ�O���D�ز��ӵ�늙C����늙C�OӋ��һ�����H�Ľ�Q������ʹ�Ú�϶��Ȧ���Ķ�****�����X���D�أ���߾�Ȧ����������ԣ��@�ӿ��ԜpС�����϶ƫ�ĵ������ԡ�
�������OӋ���^�c�������o늙C�ṩһ�������������������Ȼ���ژO�������(zh��n)���e��늙C��������횲�����߉�����ɔ�(sh��)���·�혋�������ڔ�(sh��)��ϵ�y(t��ng)���M�����m���Ժ͌��F(xi��n)�ă�(y��u)�c��Ŀǰ�����е�늙C������������ʹ�Ô�(sh��)����̖̎����(dsp)���������Ĕ�(sh��)����ʽ�����ġ��ͳɱ��\�е������Ѵ��M̎�����đ��ã���������С�����L��ÿ���D���������}�_��(sh��)Ŀ�ľ��a����****���ȵ�����z�y���������Ŀ������OӋ����늙C��ϵ�y(t��ng)�IJ�ͬ���������ѿ��]�������ஔ������ơ����l(f��)�F(xi��n)���������D�ز��ӵĮa������������늙C�OӋ�����ơ������Ҫ̽���������OӋ����(sh��)������ͬ��늙C���D�ز������ܵ�Ӱ푡�
��ǰ�������о��^�������OӋ����(sh��)��늙C�D�ز������ܵ�Ӱ����¡�[3]���о��˔�(sh��)�ֿ����������L�����}���{��(pwm)��Ӱ푣����H����pwm���Įa����[4]�ڿ��w�Ͽ��]�˔�(sh��)�ֻ���Ӱ푣������]���J��һЩ����Ҫ��Ӱ푣��������a���ֱ��ʺ�����cpu���L����ɵ��۷e�`�[5]���J��������z�y���IJ����_�Ԍ��D�ز��ӵ�Ӱ푣����H������늙C������������ڿ����������Ԍ�����ͬ��늙C�������ܵ�Ӱ���Ȼȱ��ϵ�y(t��ng)���ķ������ھ��Д�(sh��)�ֿ�����������ͬ��늙C�Ќ�����Ҫ�ļ����D�ز��ӵā�Դ�������M����ϵ�y(t��ng)���ķ�������Ҫ������ÿ����Ҫ�������OӋ����(sh��)���D�ز������ܵ�Ӱ푡�����������(sh��)�о������ɿ��ľ��a���ֱ��ʡ�cpu���L������z�y���ȵȡ��ڵڶ����֣������Y������ͬ��늙C�����У��a�������D�ز��ӵ�������Ҫԭ��Ȼ���ڵ������ֿ��]������Ӱ푺�����������
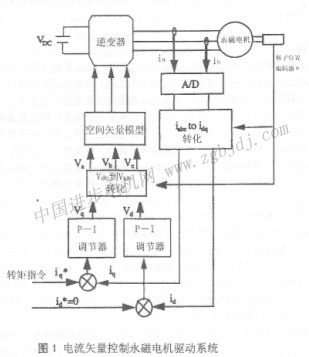
2���Д�(sh��)�ֿ������ļ����D�ز��ӵā�Դ
�D1�o����һ���˜ʵľ��Д�(sh��)�����ʸ���ň���λ��������i��ͬ��늙C��ϵ�y(t��ng)��һ��������������ҷ�늄ӄ��Լ����X���D�ص�����ͬ��늙C�ğo�D�ز����\�У���Ҫһ���c��늄ӄݲ���ͬ�������������������@Щ������ɿ������ṩ�ģ�������߉���ƺ���׃�Q�����κ�����늙C���ƫ�xͬ�����Ҳ��εĿ���������(sh��)���ǘ����D�ز��ӵā�Դ�����ڔ�(sh��)�ֿ������ĽY�������ā��f�����D�ز��ӵ���Ҫ��Դ�� |