ė├å╬Ų¼ÖC(j©®)īŹ(sh©¬)¼F(xi©żn)▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)ŠžŅl╦┬╠žąįĄ─£y(c©©)┴┐
║·╝ę╚A äóČ╦į÷ Ż©╣■Ā¢×IÖC(j©®)ļŖīŻ┐ŲīW(xu©”)ąŻ150076Ż®
1ę²čį
▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)Ą─ŠžŅl╠žąį╩ŪĘ┤ė│▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)äė(d©░ng)æB(t©żi)╠žąįĄ─ĪŻ«ö(d©Īng)▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)ū„å╬▓Į▀\(y©┤n)ąąĢr(sh©¬)Ż¼Ųõ****į╩įSžō(f©┤)▌d×ķtqŻ║
╩ĮųątjmaxĪ¬Ī¬****ņoæB(t©żi)▐D(zhu©Żn)Šž
”╚bcĪ¬Ī¬▓ĮŠÓĮŪ
ė├ļŖ╗ĪČ╚▒Ē╩Š▓ĮŠÓĮŪĢr(sh©¬)Ż¼”╚bc=2”ą/nĪŻät****į╩įSžō(f©┤)▌d┐╔▒Ē╩Š×ķŻ║
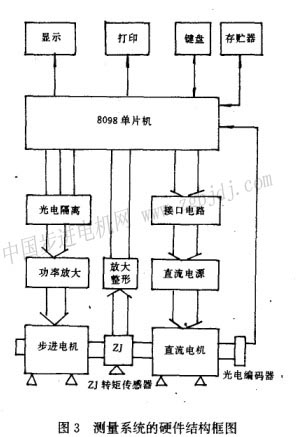
ļSų°▌ö╚ļ├}ø_Ņl┬╩ų▓Įį÷╝ėŻ¼ļŖÖC(j©®)▐D(zhu©Żn)╦┘ų▓Įį÷Ė▀Ģr(sh©¬)Ż¼Š═┐╔ęį┐┤ĄĮ▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)╦∙─▄ĦĄ─žō(f©┤)▌d▐D(zhu©Żn)ŠžųĄīóų▓ĮŽ┬ĮĄĪŻ▀@Š═╩ŪļŖÖC(j©®)▐D(zhu©Żn)äė(d©░ng)Ģr(sh©¬)╦∙░l(f©Ī)│÷Ą─▐D(zhu©Żn)Šž╩ŪļSų°├}ø_Ņl┬╩Ą─╔²Ė▀Č°£p╔┘ĪŻļŖÖC(j©®)▐D(zhu©Żn)äė(d©░ng)Ģr(sh©¬)«a(ch©Żn)╔·Ą─▐D(zhu©Żn)Šž×ķäė(d©░ng)æB(t©żi)▐D(zhu©Żn)ŠžŻ¼äė(d©░ng)æB(t©żi)▐D(zhu©Żn)Šž┼cļŖį┤├}ø_Ņl┬╩Ą─ĻP(gu©Īn)ŽĄĘQ×ķ▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)▀\(y©┤n)ąąĢr(sh©¬)Ą─▐D(zhu©Żn)Šžę╗Ņl┬╩╠žąįŻ¼║å(ji©Żn)ĘQ▀\(y©┤n)ąąŠžŅl╠žąįŻ¼╚ńłD1╦∙╩ŠŻ¼╦³╩Ūę╗ŚlŽ┬ĮĄĄ─Ū·ŠĆĪŻ
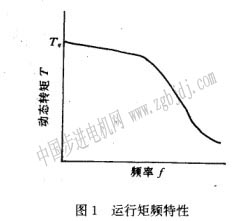
ļŖÖC(j©®)Ą─ŠžŅl╠žąį░³└©Ā┐╚ļŠžŅl╠žąį║═Ā┐│÷ŠžŅl╠žąįĪŻĀ┐╚ļŠžŅl╠žąįųĖĄ─╩Ū▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)į┌║ŃČ©Ņl┬╩├}ø_┤«“ī(q©▒)äė(d©░ng)Ž┬ļŖÖC(j©®)└Ł╚ļ═¼▓ĮĢr(sh©¬)Ż¼▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)Ą─****║ŃČ©žō(f©┤)▌d▐D(zhu©Żn)Šž┼cŅl┬╩ų«ķgĄ─ĻP(gu©Īn)ŽĄĪŻ£y(c©©)┴┐Ģr(sh©¬)Ż¼Ž╚Įo▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)╩®╝ėę╗║ŃČ©Ą─žō(f©┤)▌d▐D(zhu©Żn)ŠžŻ¼╚╗║¾ė├ę╗┤«║ŃČ©Ņl┬╩Ą─├}ø_“ī(q©▒)äė(d©░ng)ļŖÖC(j©®)Ż¼╚ń╣¹ļŖÖC(j©®)─▄║═“ī(q©▒)äė(d©░ng)├}ø_═¼▓Į▀\(y©┤n)ąąČ°ø]ėąüG╩¦├}ø_Ż¼─Ū┤╦Ņl┬╩├}ø_─▄īóįōžō(f©┤)▌d└Ł╚ļ═¼▓ĮŻ¼Įø(j©®ng)▀^(gu©░)╚¶Ė╔┐▓▀@śėĄ─įć“×(y©żn)ęį║¾Ż¼┐╔šęĄĮ─▄ē“└Ł╚ļ═¼▓ĮĄ─****žō(f©┤)▌d▐D(zhu©Żn)ŠžŻ¼┤╦▐D(zhu©Żn)Šž╝┤×ķįō“ī(q©▒)äė(d©░ng)├}ø_Ņl┬╩Ž┬Ą─Ā┐╚ļ▐D(zhu©Żn)ŠžĪŻĖ─ūā“ī(q©▒)äė(d©░ng)├}ø_Ą─Ņl┬╩Ż¼ųžÅ═(f©┤)ęį╔ŽĄ─▓Į¾Eėų┐╔ęįĄ├ĄĮ┴Ēę╗Ā┐╚ļ▐D(zhu©Żn)ŠžĪŻ▀@śėČÓ┤╬Ė─ūā“ī(q©▒)äė(d©░ng)├}ø_Ą─Ņl┬╩Ż¼Š═┐╔ęįĄ├ĄĮĀ┐╚ļ▐D(zhu©Żn)Šž┼cŅl┬╩ų«ķgĄ─ĻP(gu©Īn)ŽĄŻ¼╝┤Ųäė(d©░ng)ŠžŅl╠žąįŻ¼╚ńłD2╦∙╩ŠĪŻĀ┐│÷ŠžŅl╠žąįųĖĄ─╩Ū▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)į┌║Ń╦┘▀\(y©┤n)ąąĢr(sh©¬)▓╗üG▓ĮŻ¼┼c“ī(q©▒)äė(d©░ng)├}ø_═¼▓Į╦∙░l(f©Ī)╔·Ą─****▐D(zhu©Żn)Šž┼c“ī(q©▒)äė(d©░ng)├}ø_Ņl┬╩ų«ķgĄ─ĻP(gu©Īn)ŽĄĪŻ£y(c©©)┴┐Ģr(sh©¬)Ż¼Ž╚╩╣▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)ŲĮĘĆ(w©¦n)▀\(y©┤n)ąąį┌ĮoČ©├}ø_Ņl┬╩╔ŽŻ¼╚╗║¾ųØuį÷╝ėžō(f©┤)▌d▐D(zhu©Żn)ŠžŻ¼į┌ļŖÖC(j©®)äéę¬╩¦╚ź═¼▓ĮĢr(sh©¬)Ż¼┐╔£y(c©©)│÷┤╦Ģr(sh©¬)ļŖÖC(j©®)Ą─****žō(f©┤)▌d▐D(zhu©Żn)ŠžŻ¼▀@éĆ(g©©)▐D(zhu©Żn)Šž╝┤×ķįō“ī(q©▒)äė(d©░ng)├}ø_Ņl┬╩Ž┬Ą─Ā┐│÷▐D(zhu©Żn)ŠžĪŻĖ─ūā“ī(q©▒)äė(d©░ng)├}ø_Ą─Ņl┬╩Ż¼ųžÅ═(f©┤)╔Ž╩÷▓Į¾EŻ¼┐╔ęį£y(c©©)Ą├Ā┐│÷▐D(zhu©Żn)Šž┼c“ī(q©▒)äė(d©░ng)├}ø_Ņl┬╩ų«ķgĄ─ĻP(gu©Īn)ŽĄŻ¼╝┤Ā┐│÷ŠžŅl╠žąįĪŻ
2£y(c©©)┴┐ŽĄĮy(t©»ng)Ą─ė▓╝■ĮY(ji©”)śŗ(g©░u)
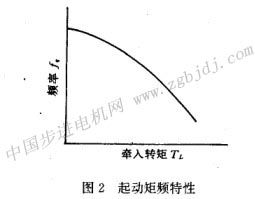
£y(c©©)┴┐ŽĄĮy(t©»ng)Ą─ė▓╝■ĮY(ji©”)śŗ(g©░u)┐“łD╚ńłD3╦∙╩ŠĪŻ
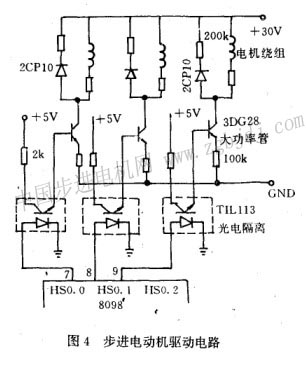
š¹éĆ(g©©)ŽĄĮy(t©»ng)Ęų×ķ╚²┤¾▓┐ĘųĪŻ8098å╬Ų¼╬óÖC(j©®)▓┐ĘųŻ¼▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)“ī(q©▒)äė(d©░ng)║═ų▒┴„ļŖäė(d©░ng)ÖC(j©®)┐žųŲ▓┐ĘųŻ¼▐D(zhu©Żn)ŠžÖz£y(c©©)║═▐D(zhu©Żn)ĮŪ£y(c©©)┴┐▓┐ĘųĪŻ╬óÖC(j©®)▓┐Ęųų„ę¬ė╔’@╩ŠļŖ┬ĘĪóµI▒PļŖ┬ĘĪó┤µ┘AŲ„ļŖ┬Ę║═┤“ėĪÖC(j©®)Ą╚ĮM│╔ĪŻė├üĒ(l©ói)’@╩Š▀\(y©┤n)ąąĀŅør║═£y(c©©)┴┐ĮY(ji©”)╣¹Īó┤“ėĪł¾(b©żo)Ėµå╬ĪóµI╚ļėąĻP(gu©Īn)│ŻöĄ(sh©┤)ęį╝░ŽĄĮy(t©»ng)┐žųŲĄ╚ĪŻ▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)Ą─“ī(q©▒)äė(d©░ng)ļŖ┬Ę╚ńłD4╦∙╩ŠĪŻį┌▄ø╝■Ą─┐žųŲŽ┬Ż¼ė╔8098å╬Ų¼ÖC(j©®)Ą─Ė▀╦┘▌ö│÷═©Ą└hso.0Īóhso.1Īóhso.2▌ö│÷├}ø_Ż¼▓ó═©▀^(gu©░)╣ŌļŖ±Ņ║ŽŲ„til113┐žųŲ┤¾╣”┬╩╣▄3dg28Ą─ī¦(d©Żo)═©┼cĮžų╣Ż¼īŹ(sh©¬)¼F(xi©żn)▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)└@ĮMĄ─═©ļŖ┼cöÓļŖŻ¼▀_(d©ó)ĄĮ▓Į▀M(j©¼n)─┐Ą─ĪŻ╣ŌļŖĖ¶ļxĄ─ū„ė├╩Ūīóėŗ(j©¼)╦ŃÖC(j©®)▓┐Ęų║═┤¾╣”┬╩▓┐ĘųĖ¶ļxķ_Ż¼ęįĘ└ų╣ÅŖ(qi©óng)ą┼╠¢(h©żo)ĖZ╚ļėŗ(j©¼)╦ŃÖC(j©®)▓┐ĘųŻ¼įņ│╔▓╗æ¬(y©®ng)ėąĄ─╣╩šŽĪŻ
ų▒┴„ļŖäė(d©░ng)ÖC(j©®)Ą─┐žųŲ╩Ūė╔8098å╬Ų¼ÖC(j©®)Ą─Ė▀╦┘▌ö│÷═©Ą└hso.3║═hsoŻ«4Įø(j©®ng)╣ŌļŖĖ¶ļx║═ąĪ╣”┬╩ų▒┴„└^ļŖŲ„┼cų▒┴„ļŖäė(d©░ng)ÖC(j©®)Ą─ļŖśą└@ĮM║═╝ż┤┼└@ĮMĮėŻ¼┐žųŲļŖśą║═š{(di©żo)╣Ø(ji©”)╝ż┤┼ļŖ┴„Ż¼ė├ęį▒ŻūC▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)žō(f©┤)▌dĄ─š{(di©żo)╣Ø(ji©”)║══©öÓĪŻ
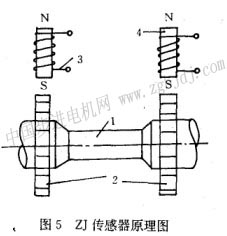
▐D(zhu©Żn)ŠžĄ─£y(c©©)┴┐╩Ū═©▀^(gu©░)zją═▐D(zhu©Żn)Šžé„ĖąŲ„īŹ(sh©¬)¼F(xi©żn)Ą─ĪŻzjé„ĖąŲ„Ą─įŁ└ĒłD╚ńłD5╦∙╩ŠĪŻųąķg×ķę╗ÅŚąį▌S1Ż¼Ųõā╔Č╦░▓čbėąā╔éĆ(g©©)ŽÓ═¼²XöĄ(sh©┤)Ą─²X▌å2Ż¼├┐éĆ(g©©)²X▌åĄ─═Ōé╚(c©©)Ė„░▓čbę╗ēK┤┼õō4Ż¼┤┼õō╔Žéõ└@ėąą┼╠¢(h©żo)ŠĆ╚”3ĪŻ«ö(d©Īng)▐D(zhu©Żn)▌Są²▐D(zhu©Żn)Ģr(sh©¬)Ż¼ė╔ė┌┤┼õō┼c²X▌åķgĄ─ÜŌŽČ┤┼ī¦(d©Żo)ļSų°²X▓█╬╗ų├Ą─ūā╗»Č°░l(f©Ī)╔·ų▄Ų┌ąįĄ─ūā╗»Ż¼╩╣┤®▀^(gu©░)ą┼╠¢(h©żo)ŠĆ╚”Ą─┤┼═©╚f(w©żn)ę▓░l(f©Ī)╔·ų▄Ų┌ąįĄ─ūā╗»Ż¼ė┌╩Ūį┌ą┼╠¢(h©żo)ŠĆ╚”ųąĘųäeĖąæ¬(y©®ng)│÷ļŖä▌(sh©¼)Ż¼į┌═Ō╝ė▐D(zhu©Żn)ŠžĢr(sh©¬)Ż¼ÅŚąį▌SĄ─ę╗Č╦ŽÓī”(du©¼)┴Ēę╗Č╦«a(ch©Żn)╔·Ų½▐D(zhu©Żn)ĮŪ¾šŻ¼a┼c═Ō╝ė▐D(zhu©Żn)Šž│╔š²▒╚ĪŻį┌ā╔éĆ(g©©)ą┼╠¢(h©żo)ŠĆ╚”ųąĖąæ¬(y©®ng)ļŖä▌(sh©¼)Ą─ŽÓ╬╗▓ŅĮŪę▓ļS▐D(zhu©Żn)ŠžĄ─ūā╗»Č°░l(f©Ī)╔·ŽÓæ¬(y©®ng)Ą─ūā╗»ĪŻā╔éĆ(g©©)ŠĆ╚”ųąĄ─Ėąæ¬(y©®ng)ļŖä▌(sh©¼)×ķu1Īóu2Ż║