į┌ÅŚĄ└özė░ĮøŠĢāx蹊┐ųąŻ¼ąĶę¬īŹ¼Fā╔ŽÓÖC═¼▓Į┐ņķTĄ─┐žųŲĪŻā╔ŽÓÖCśOŽ▐ŠÓļx×ķ4kmŻ¼┼─özŅl┬╩×ķf=1Ī½24Ę∙Ż»sŻ¼į┌▓╔ė├┴”Šž╩Įūįš¹ĮŪÖC═¼▓Į┐žųŲ║¾Ż¼é„▌öśOŽ▐ŠÓļx×ķ2kmŻ¼ūįš¹ĮŪÖC▐D╦┘****▀_2160r/minŻ¼Įė╩šĮŪÖCžō▌d▐DŠž×ķ3. 39Ī┴10
2ėŗ╝░ķL▀BŠĆļŖūĶĢr┴”Šž╩Įūįš¹ĮŪÖCĄ─▒╚š¹▓Į┴”Šž
Ė∙ō■┴”Šž╩Įūįš¹ĮŪÖC▓ó┬ō▀\ąą└ĒšōŻ¼╚¶ėąn┼_═¼ą═╠¢Ą─Įė╩šĮŪÖCĄ╚ŠÓļx▀BĮėĄĮ═¼ę╗┼_░l╦═ĮŪÖC╔ŽŻ¼╝┤ę╗Ħ┐┐▓ó┬ō▀\ąąĢrŻ║
╔Ž╩Į║÷┬į┴╦ķL▀BŠĆūĶ┐╣Ą─ė░ĒæŻ¼«öėŗ╝░ķL▀BŠĆūĶ┐╣ĢrŻ©ų„ę¬╩Ū▀BŠĆĄ─ļŖūĶŻ¼ŲõļŖ┐╣╔§ąĪŻ¼╝┤ķL▀BŠĆūĶ┐╣ī”Įė╩šĮŪÖC▒╚š¹▓Į┴”ŠžĄ─ė░ĒæŻ¼═©│Ż╩ŪĮĶį÷╝ėš¹▓Į╗ž┬ĘļŖūĶųĄ┐╝æ]Ą─ĪŻ
ī”łD1╦∙╩ŠĄ╚ą¦ļŖ┬ĘŻ¼æ¬ė├»B╝ėįŁ└Ē
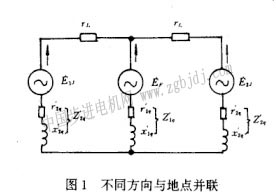
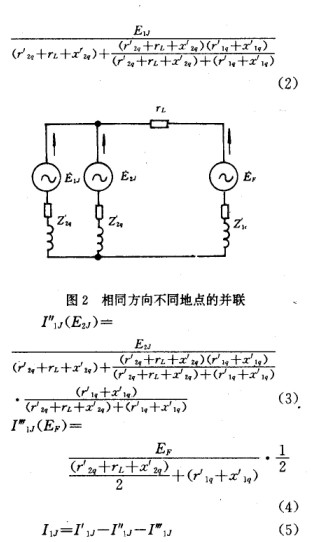
▒Š╬─ęįā╔┼_═¼ą═╠¢Įė╩šĮŪÖCĄ╚ŠÓļxĄž▀BĮėĄĮę╗┼_▓╗═¼ą═╠¢Ą─░l╦═ĮŪÖC×ķ└²Ż¼▀@ī”░l╦═ĮŪÖCš¹▓Į└@ĮMČ°čįŻ¼ā╔┼_Įė╩šĮŪÖCš¹▓Į└@ĮMŽÓ«öė┌▓ó┬ōŻ¼Ūęėąā╔ĘNī”ĘQĘų▓╝Ą─▓ó┬ōĪŻłD1×ķ▓╗═¼ĘĮŽ“┼cĄž³cĄ─▓ó┬ōŻ¼łD2×ķŽÓ═¼ĘĮŽ“▓╗═¼Ąž³cĄ─▓ó┬ōŻ¼Š∙×ķĮ╗▌SĄ╚ą¦ļŖ┬ĘĪŻĄ├Ż║
╝┘Č©e1j =e2jŻ¼╝┤Įė╩šĮŪÖCķgŽÓ╗ź¤oė░ ĒæŻ¼Įø╗»║å┐╔Ą├Ż║
«ö░l╦═ĮŪÖC┼cĮė╩šĮŪÖCķgėą╩¦š{ĮŪ”╚┤µį┌ĢrŻ¼╝┤ėąĪ„e┤µį┌Ż¼š¹▓Į└@ĮM╗ž┬ĘėąļŖ┴„┤µį┌ĪŻ
═ŲÅVĄĮn┼_═¼ą═╠¢Įė╩šĮŪÖCĄ╚ŠÓļx▀BĮėĄĮ═¼ę╗┼_░l╦═ĮŪÖC╔ŽŻ¼ätėąŻ║
Ųõ▒╚š¹▓Į┴”Šžæ¬×ķŻ║
ā╔ĘN▓ó┬ō▀\ąąĄ─ģ^äeį┌ė┌Ż¼Ū░š▀╩ŪŽ╚┤«║¾▓óŻ¼║¾š▀╩ŪŽ╚▓ó║¾┤«ĪŻ
3╩Š└²
ā╔┼_═¼ą═╠¢ūįš¹ĮŪĮė╩šÖCŻ©ęŖłD1Ż®▓ó┬ō▀\ąąĢrŻ¼ķL▀BŠĆī”Ųõ▒╚š¹▓Į┴”Šžė░ĒæĄ─ÄūéĆĄõą═īŹ└²ĪŻ
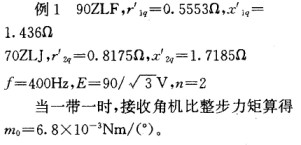
«öę╗Ħę╗ĢrŻ¼Įė╩šĮŪÖC▒╚š¹▓Į┴”Šž╦ŃĄ├mo=6.8Ī┴l0-3nm
«öę╗Ħā╔▓ó┬ō▀\ąąĢrŻ¼╚¶║÷┬įŻ¼┐╔╦ŃĄ├mo =5. 32Ī┴10-3nmĪŻįōėŗ╦ŃųĄąĪė┌ę╗Ħę╗▀\ąąĢrĄ─ųĄŻ¼▀@╩Ūę“×ķ«öā╔┼_Įė╩šĮŪÖC▓ó┬ō▀\ąąĢrŻ¼ų╗ėą«öŲõØMūŃ
▒╚š¹▓Į┴”Šž▓┼▓╗ų┴ė┌ĮĄĄ═Ż¼╚¶▓╗ØMūŃ╔Ž╩÷ĻPŽĄĢrŻ¼▓ó┬ō▀\ąąĢrĄ─moöĄųĄĢ■ėą╦∙£pąĪĪŻ
«ö▓╔ė├19ąŠļŖÜŌé„▌öļŖ└|ā╔Ė∙▓ó╩╣ė├ĢrŻ¼Ųõ├┐Ė∙ī¦ŠĆų▒ÅĮ×ķ”š0. 9mmŻ¼Ūę9╣╔Ż»Ė∙└@ųŲŻ¼▀BŠĆķL×ķ2kmĢrŻ¼Įøėŗ╦Ń┼cį┌─│įć“×╗∙ĄžīŹ£yŠ∙×ķr
l=30. 5”žŻ¼īóŲõ┤·╚ļ╩Į(8)╦ŃĄ├Ż¼m
o=l. 23Ī┴10
-4nmī”▒╚║÷┬į║═ėŗ╝░ķL▀BŠĆļŖūĶr
lĢrŻ¼Įė╩šĮŪÖC▒╚š¹▓Į┴”ŠžĄ─öĄ