�\�ӿ��ƌ��ü����·������
�T����(�V������ƌW�о���
��ժ Ҫ�����Ğ顰�\�ӿ��ƌ��ü����·������(�m6)(Ҋ1993�꡶늙C����4��)���mƪ����Bmc33034�oˢֱ��늄әC����������Ҫ�M�ɲ��֡����ܡ�mc33039��Ӝy�����Ĺ���ԭ�����ڟoˢֱ��늄әC�{��ϵ�y�еđ��á�
���� �~�������·�oˢֱ��늄әC�]�h�{�ٿ�����ԭ�푪��7 mc33034�oˢֱ��늄әC��������mc33039��Ӝy����
mc33034��motorora�Q֮��ڶ����ğoˢֱ��늄әC���������ü����·�������Á���������(ȫ���Ͱ벨)������������oˢֱ��늄әC���ټ���һƬmc33039��Ӝy�������ٶȷ����ɘ����]�h�ٶ��{��ϵ�y��
7��1 mc33034�oˢֱ��늄әC������
�������·ԭ������D��D1��ʾ��������Ҫ�M�ɲ��ְ�����
���D��λ�Â��������g�a��
�����ض��a���ăȲ������Դ
���l�ʿ��O������X����ʎ��
���`��Ŵ���
���}���{��(pwm)���^��
��ݔ�����·
��Ƿ늉��i�����o��оƬ�^�ᱣ�o�ȹ���ݔ��
�������·
�������·��ݔ���·��6·���Á���������׃������3�����·�Ǽ�늘O�_·npn���w�ܣ���������׃���Ϙ�ۡ�����3�����·������ʽ�Y���·����������׃����ۣ���ֱ����һ�����ʵľ��w�ܡ�1gbt����mosfet��
���Ϳ��ƹ��ܰ����_�hpwm�ٶȿ��ơ�ʹ�ܿ���(���ӻ�ֹͣ)�������D���ƺ��ܺ��Ƅӿ��ƣ��m���������Ԫ�����Ɍ��Fܛ���ӡ�
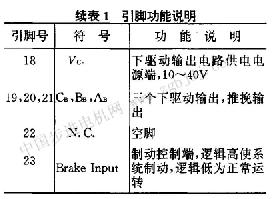
ʹ�ù���늉�40v���£���24�_�ܷ��p��ֱ��ʽ���b��
7��2�����f��
7��2��1�D��λ�Â������g�a�·
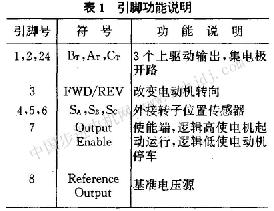
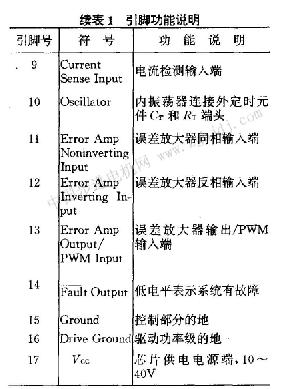
���g�a�·���oˢֱ��늄әC�D��λ�Â�������̖�D�Q��6·��ݔ����̖�����m���ڼ�늘O�_·�Ļ���Ч�������·���������·����ʽ�Ă�������ݔ���(4��5��6�_)�O��������裬ݔ���·�cttl���ݣ��T��늉���1��4v����������Ҫ��ֱ���Դ���ԏ�8�_�����Դ�Ы@��(Ҋ��1)��
���m����ͬ�ğoˢֱ��늄әC����������λ����λ�ͬ���ṩ�ɷN��ͬ��̖�aƷ��mc33034p60�m����λ���60o��300������mc33034p120�t�m����λ���120����240��(��Ҋ��2��ֵ��)�� ����3��ݔ����̖��ԭ�t�Ͽ���8�N߉�M�ϡ�����6�N������B�Q����늙C6�� 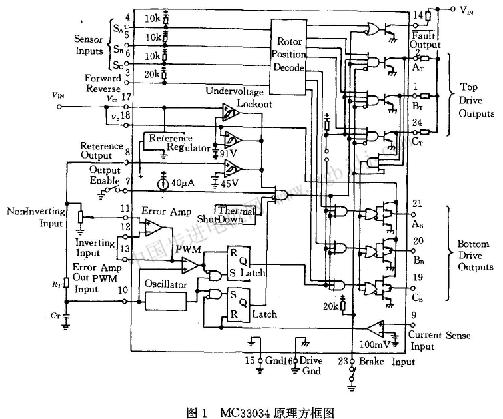 ��ͬ��λ�à�B�������ɷN�M�ό�����λ�Â�������������B������̖���_·�ض�·��B���˕rʹfault��̖���㡣
��3�_����׃늙C�����D������3�_߉��B��׃��������ݔ����̖���g�a���ȸ�׃��߉��B��ԭ���ķǣ��ٽ��g�a�õ�������ēQ��ݔ����̖��ʹ늄әC���D�\�С�
늙C���_���P������7�_enable���F����7�_�ҿՕr���Ȳ�40��a���Դ���ʹݔ�����·������������7�_�ӵأ���3��  7��2��2�`��Ŵ���
оƬ���O�и����ܡ�ȫ�a�����`��Ŵ�ݔ���_·����3��ݔ�����ƞ���ƽ��ʹ늙Cʧȥ�����ͣ܇��ͬ�rfault��̖���㡣
��23�_brake̎�ڸ��ƽ�r�����F늙C�Ƅӿ��ơ���ʹ��3����ݔ���_·������3����ݔ���·ͬ�r���ƌ�ͨ��׃��3����۹����_�P����늄әC�@�M���^�̽ӣ����F�����ܺ��Ƅӡ�оƬ�Ȳ���4�c�T�·����ݔ����brake input������3����ݔ����̖���������ǵȴ���3����ݔ����̖�����D��ߠ�B�r����ʹ��3����ݔ����̖׃��ߠ�B���Ķ�������׃������۳��Fֱͨ��Σ�U���������]�h�ٶȿ��ƕr���Ŵ�����ֱ��늉��������ֵ��95db�����控����800khz���Ќ��Ĺ�ģݔ��늉��������ĵص�vccһ2��0v����
ϵ�y���_�h���ƕr���Ɍ��˷Ŵ����Ľӳ������1��늉����S�����ٶ��O��늉�����ͬ��ݔ���(11�_)ݔ�룬12��13�_�̽ӡ�
7��2��3��ʎ��
|